CS 4432: Database Systems II
-
Introduction
-
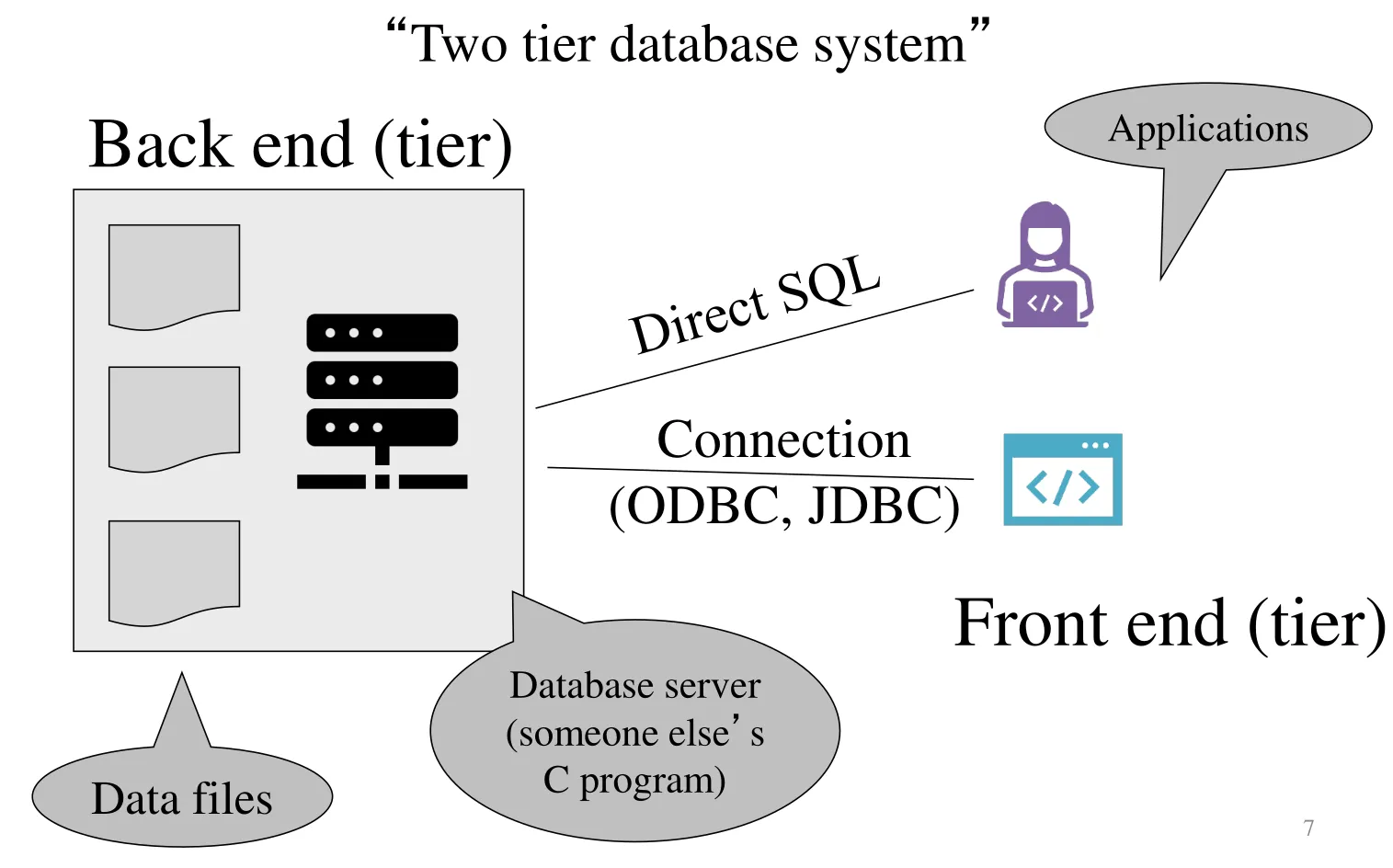
RDBMS
-
A collection of files that store the data
- But: Files that we do not directly access or read
-
A big C program written by someone else that accesses and updates those files for you
- But: Huge program containing 100s of 1000s of lines
-
-
Structure
-
Frontend: SQL
-
Data Definition Language - DDL
-
Data Manipulation Language - DML
-
-
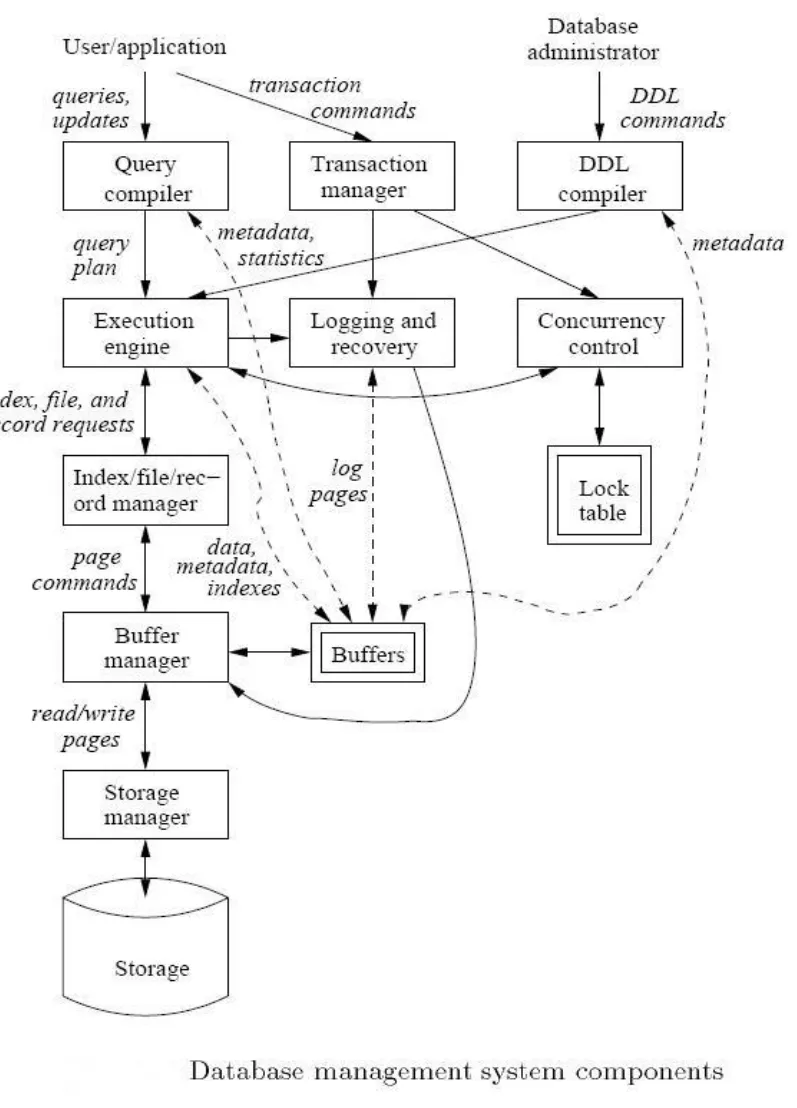
Backend
-
Query optimizer
-
Query engine
-
Storage management
-
Transaction management (concurrency, recovery)
-
-
-
Abstraction
-
Tables (logical) → Creating file (data), may create indexes, updating catalog tables, read and update files on disk, check constraints (physical)
-
Queries (logical, declarative) → Imperative query execution plan
-
Complex cost model and many alternatives
-
The optimizer chooses the best execution plan for a query (may involve indexes)
-
-
Indexes (logical, declarative) → Create a index file, create a specialized data structure, whenever the data changes, the index has to be updated
-
Transactions (logical) → Concurrency control and logging and recovery control to ensure ACID properties
-
-
File & System Structure: Records in blocks, dictionary, buffer management
-
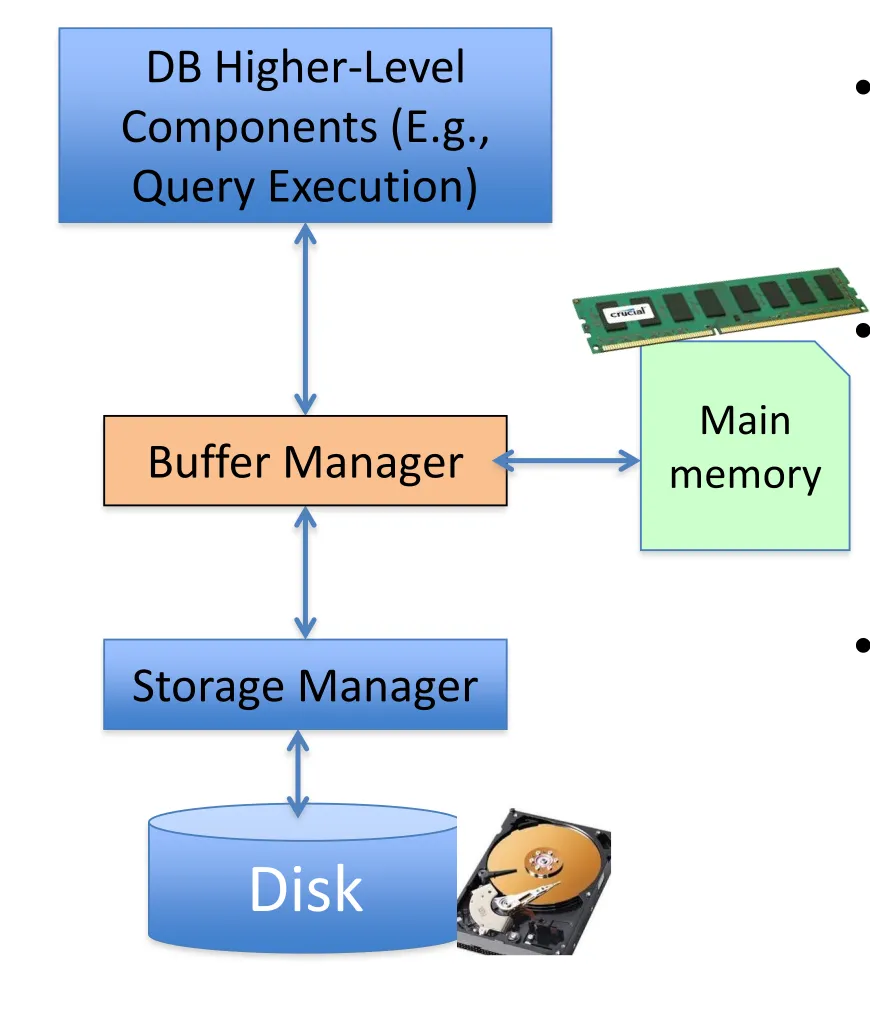
Disks and files
-
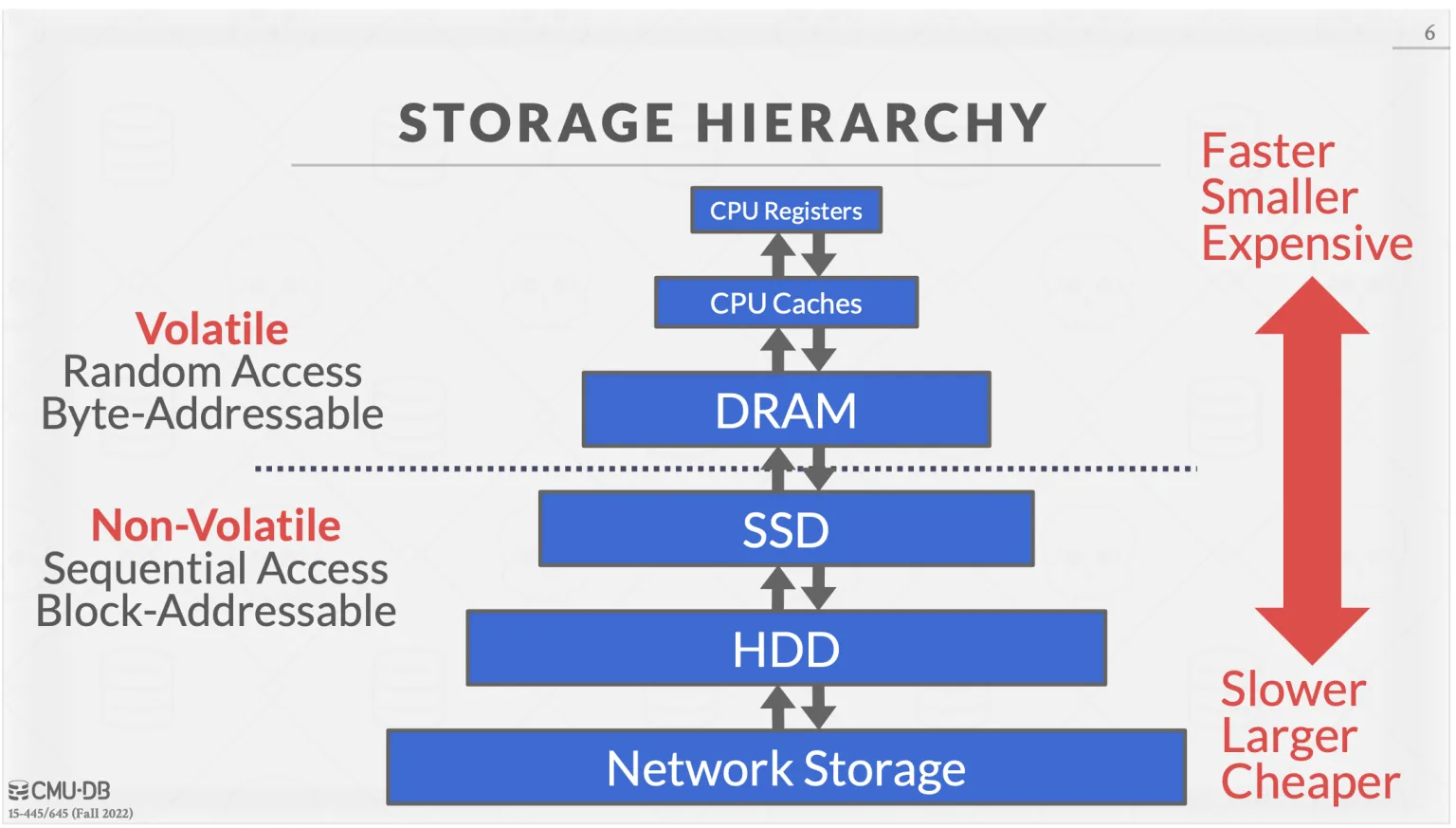
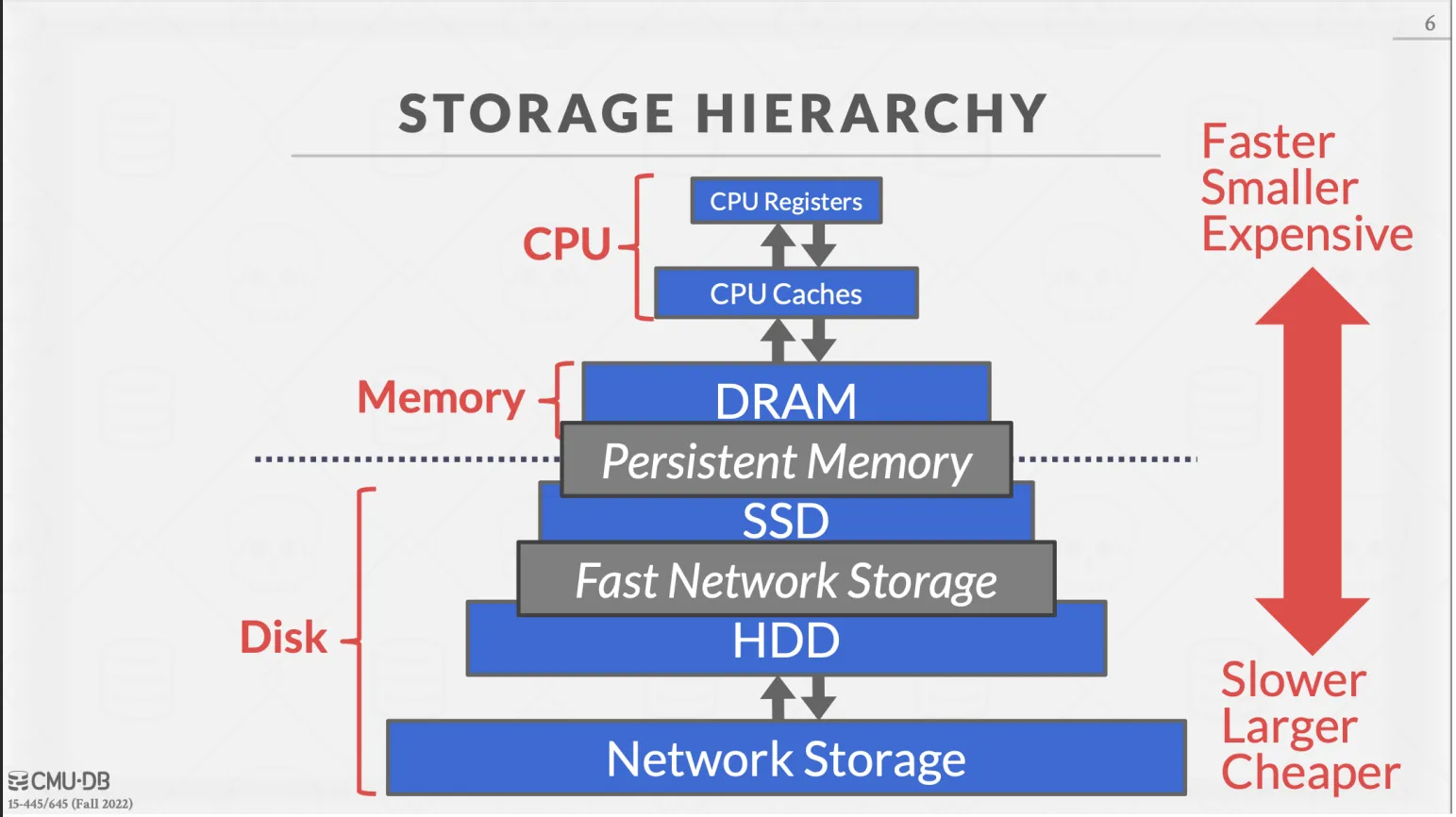
DBMS stores info on disks
-
Main memory is only for processing
-
Major implications on their design
-
READ: transfer data from disk → main memory
-
WRITE: transfer data from RAM → disk
-
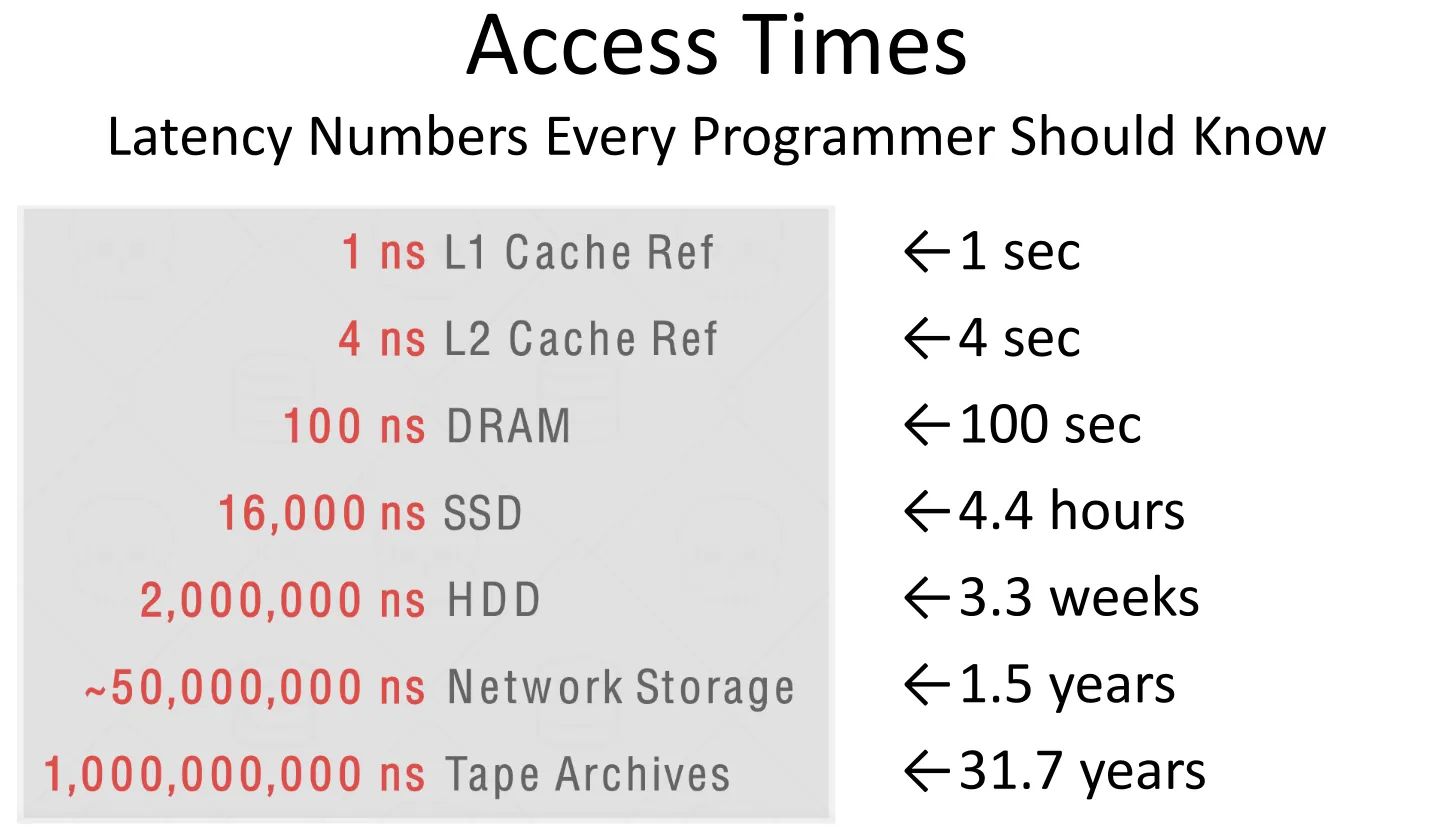
High-cost operations (I/O) relative to in-memory operations
-
-
OS may take away memory in use by DBMS mid-operation (joining tables)
- Why DBMS has storage manager and buffer manager
-
-
-
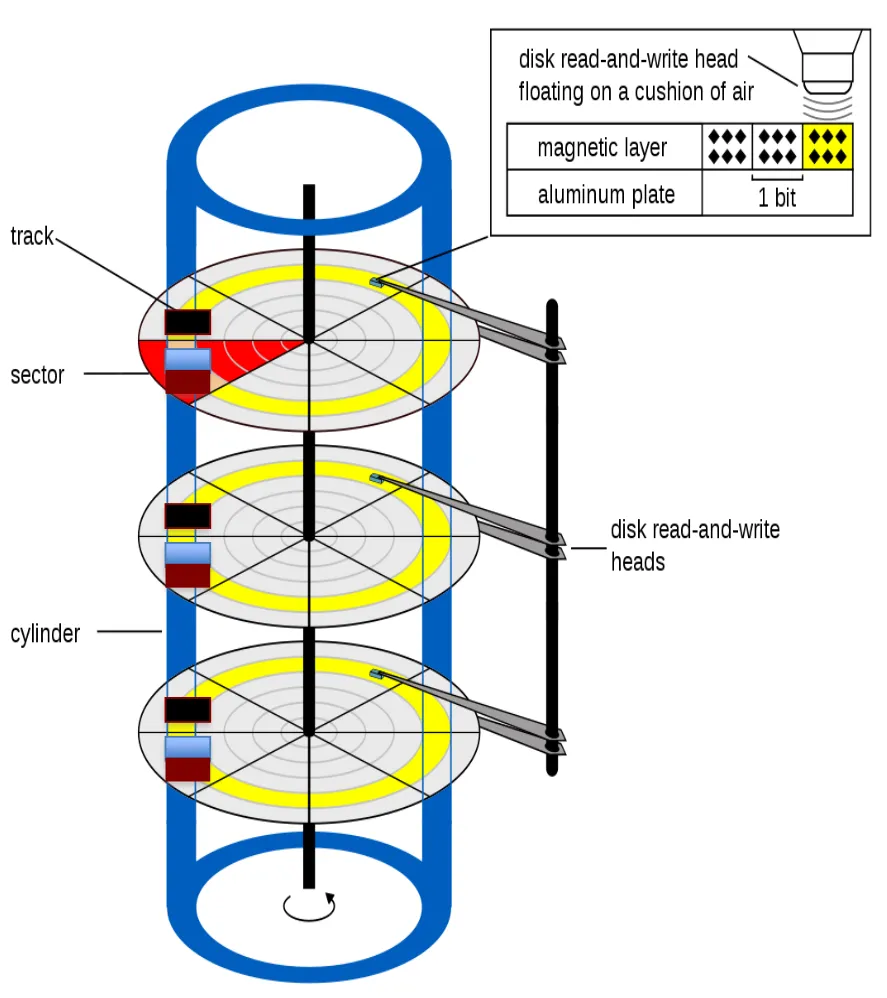
Disks
-
Data is stored and retrieved in units called disk blocks (sometimes also referred to as “pages”)
-
Disk block typically between 4KB to 8KB
-
Movement to main memory
-
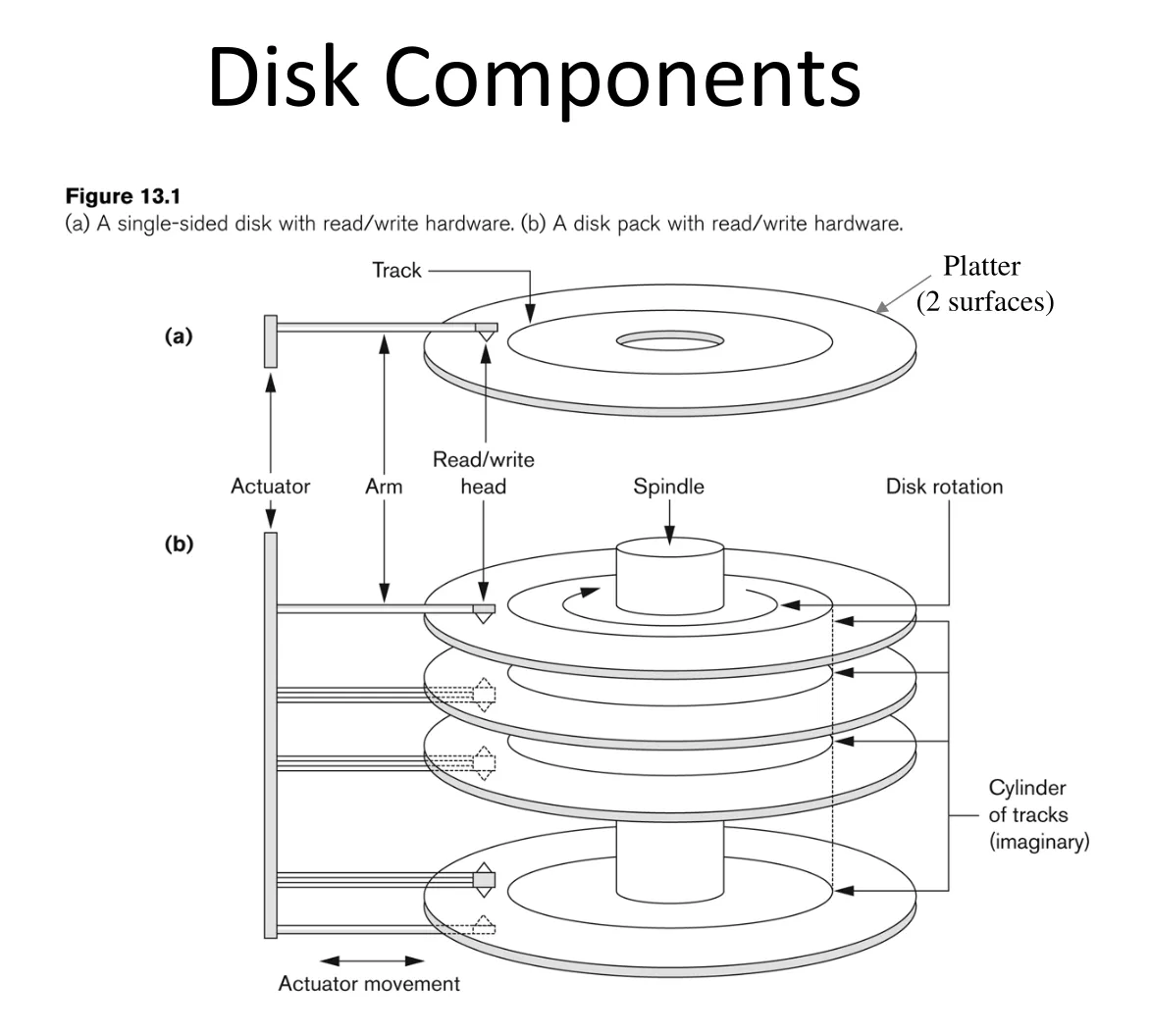
Must read or write one block at a time, meaning all R/W heads move together across tracks
-
Only one head is active at a time during a read/write operation
-
-
-
Movements
-
Arm moves in-out
-
Called seek time
-
Mechanical
-
-
Platter rotates
-
Called latency (or rotation) time
-
Mechanical
-
-
-
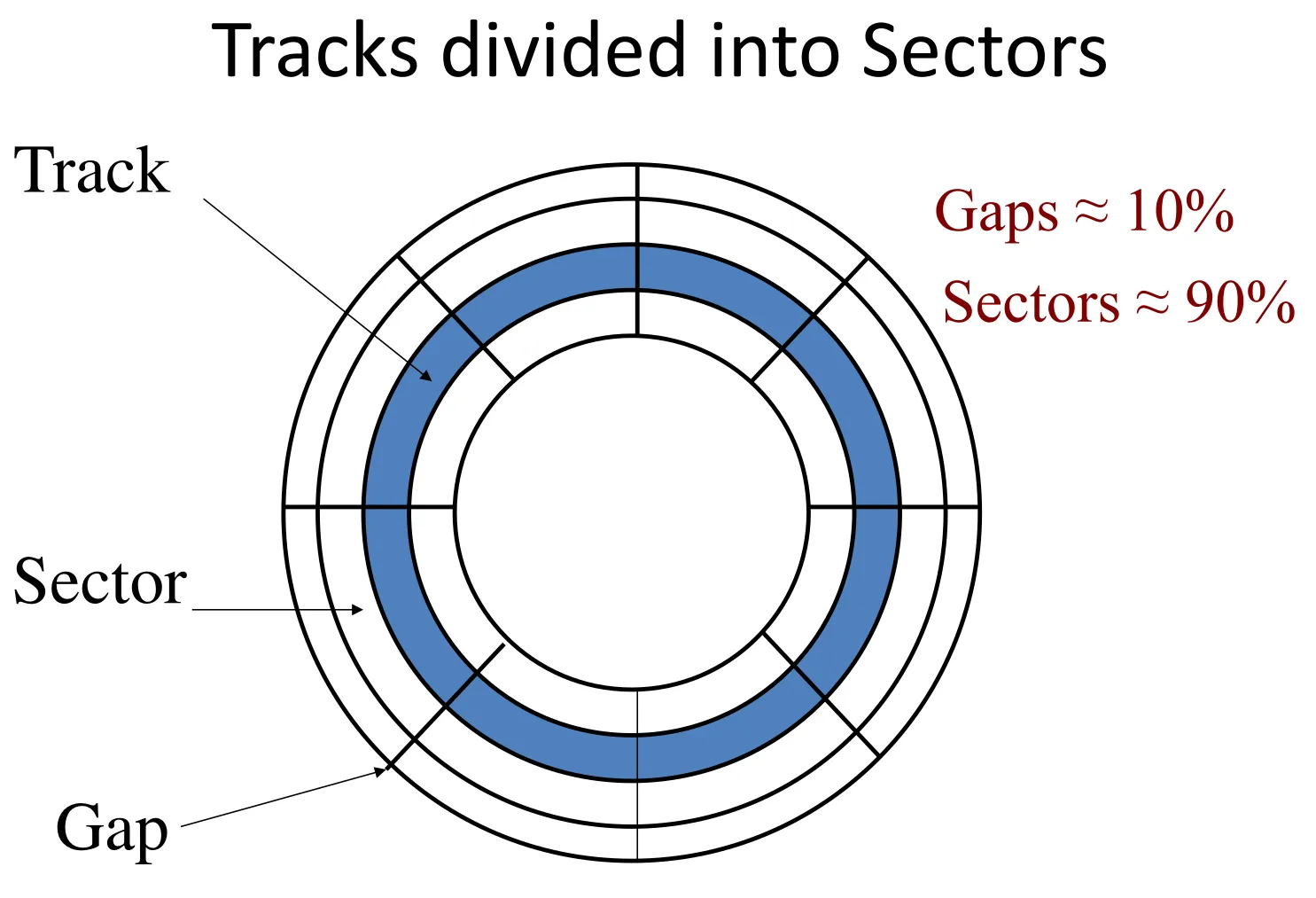
Sequential I/O typically costs less than random I/O because of less rotation time (all blocks sit next to each other on a track)
-
Read two random blocks
-
2 seek times
-
2 latency times
-
2 transfer times
-
-
Read two blocks in a sequence
-
1 seek time
-
1 latency time
-
2 transfer times
-
-
-
Data storage
-
Size = 2 * num of platters * tracks * sectors * bytes per sector
- 1KB = 1024 bytes
-
Accessing disk block latency = seek time (warm-up + travel) + latency (rotational) time + data transfer time
-
Average seek time = time to travel half of the number of tracks on a platter surface
- ~9ms, ~4ms for high-performance drives
-
Average rotational latency = half of the time to make one full rotation
- 10,000RPM = 3ms for newer drivers
-
Transfer time
-
100-200MB/sec
-
Reading 4K data block takes ~0.02-0.04ms
-
Very small relative to seek and rotation time
-
-
Key to lower I/O cost: reduce seek/rotation latency → Sequential I/O
-
-
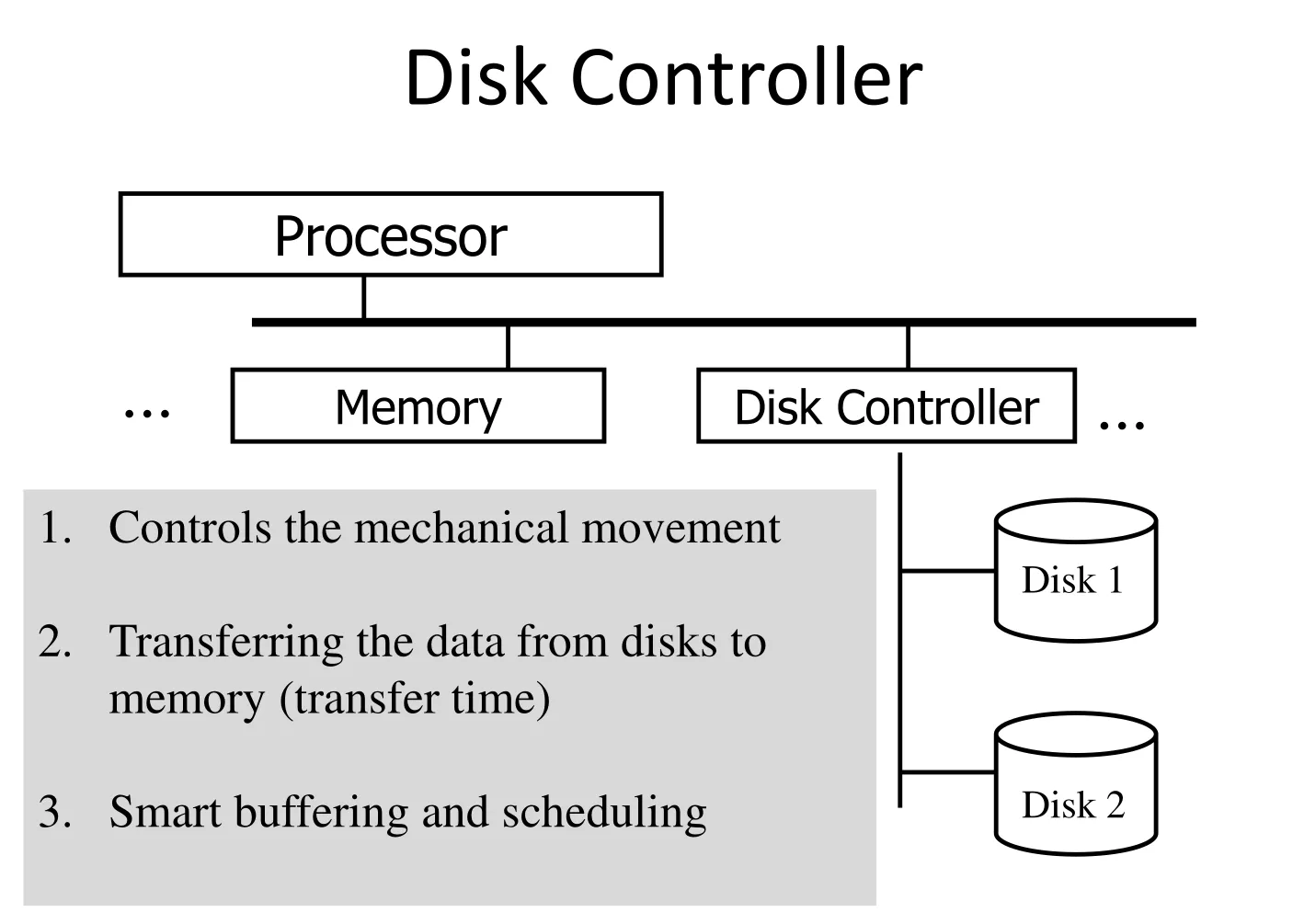
Accelerating access to blocks: performed by Disk Controller
-
Hardware component on the HDD that is responsible for managing data transfer
-
Main techniques
-
RAID: Redundant Array of Independent Disks: techniques used to improve storage performance, reliability, or both
-
Combines multiple physical disks into a single logical unit for redundancy and performance
-
Techniques: striping, mirroring, and parity
-
Several RAID levels
-
-
-
RAIDDescription** Redundancy Performance Storage Use Case Level Efficiency**
RAID 0 Striping None High 100% Non-critical, high-speed tasks
RAID 1 Mirroring High Moderate 50% Critical data, system drives
RAID 5 Striping with Medium Good (N-1)/N General-purpose Parity storage
RAID 6 Striping with High Moderate (N-2)/N High-reliability Double Parity storage
RAID 10 Mirroring + High High 50% High-performance, Striping critical data
-
-
Placing related blocks on same cylinder
-
Put on the same cylinder to read them at once
-
Make use of the 2 surfaces in the same cylinder
-
Add more blocks on the next sectors on the same track
-
“At once” meaning “one at a time but really fast” because transfer time <<< rotation time
-
-
Using multiple disks: Striping (RAID 0)
-
Use multiple smaller disks instead of one larger disk
-
Each disk can access data independently, in parallel
- N disks → N times faster access
-
-
Mirroring (RAID 1)
-
Use pair of disks that mirror each other
-
Good for durability but higher overhead for writing
-
-
Disk scheduling
-
Disk Controller holds a sequence of block requests (queue of requests)
-
Not necessarily serve requests in their arrival order (FIFO) ➔ Use better scheduling policy
-
Elevator (SCAN) policy
-
Purpose: Optimize disk read/write head movement.
-
Mechanism:
-
Moves in one direction (e.g., inward to outward or vice versa).
-
Services all requests along the path in the current direction.
-
Reverses direction at the end of the disk.
-
-
Advantages:
-
Fairness: Services requests at both ends of the disk.
-
Reduces starvation compared to FCFS.
-
-
Disadvantages:
-
Overhead: May travel to the end unnecessarily.
-
Latency: Requests at the far end may wait longer.
-
-
Example:
-
Cylinders: 0 (inner) to 199 (outer).
-
Head at 50, moving outward.
-
Requests: [10, 60, 80, 120, 30].
-
Services: 60 → 80 → 120 → (reverses) → 30 → 10.
-
-
Efficient and fair, but may incur overhead due to unnecessary disk arm movement
-
-
-
Prefetching and buffering
-
If DBMS can predict the sequence of access, it can pre-fetch and buffer more blocks even before requesting them.
-
Naive single buffer algorithm
-
Say a file has sequence of blocks B1, B2,… and a program that process B1, B2, B3,…
-
Execution of algorithm
-
(1) Read B1 → Buffer
-
(2) Process Data in Buffer
-
(3) Read B2 → Buffer
-
(4) Process Data in Buffer
-
-
Cost: n(P+R)
-
P: time to process a in-memory block
-
R: time to read disk block (seek + latency + transfer)
-
n: # of blocks
-
-
-
Double buffering
-
Purpose: Overlap I/O operations with computation to reduce idle time.
-
How it works:
-
Two in-memory buffers are used: Buffer A and Buffer B.
-
While the CPU processes data in Buffer A, the I/O system loads data into Buffer B.
-
Once the CPU finishes processing Buffer A, it switches to Buffer B, and the I/O system loads new data into Buffer A.
-
-
Advantages:
-
Reduces CPU idle time by overlapping I/O and computation.
-
Smooths out performance for real-time systems (e.g., video playback).
-
-
-
Prefetching
-
Purpose: Reduce latency by loading data into memory before it is needed.
-
How it works:
-
The system predicts which data will be needed next and loads it into memory in advance.
-
Prefetched data is stored in a buffer or cache.
-
-
Advantages:
-
Hides memory or disk latency by overlapping data transfer with computation.
-
Improves performance for sequential or predictable access patterns.
-
-
-
Combining double buffering and prefetching
-
While the CPU processes data in Buffer A, prefetching loads data into Buffer B.
-
When the CPU switches to Buffer B, prefetching loads the next set of data into Buffer A.
-
-
Cost: R + nP
-
Have to pay R for the first block
-
Assuming sequential I/O, time to read other blocks is very small compared to P
-
Time to retrieve them overlaps with nP
-
-
-
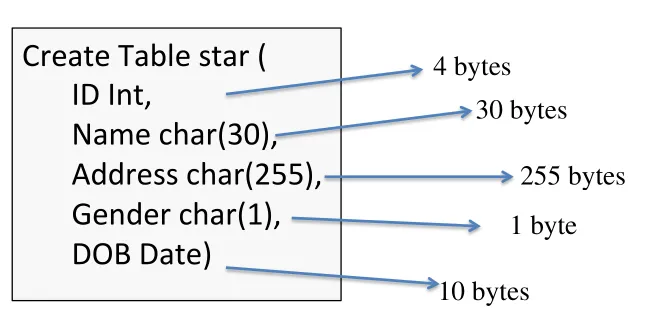
Record representation
-
Database records (tuples)
-
Each record, and each field is just a sequence of bytes on a disk block
-
Field has type that can be fixed- or variable- length
-
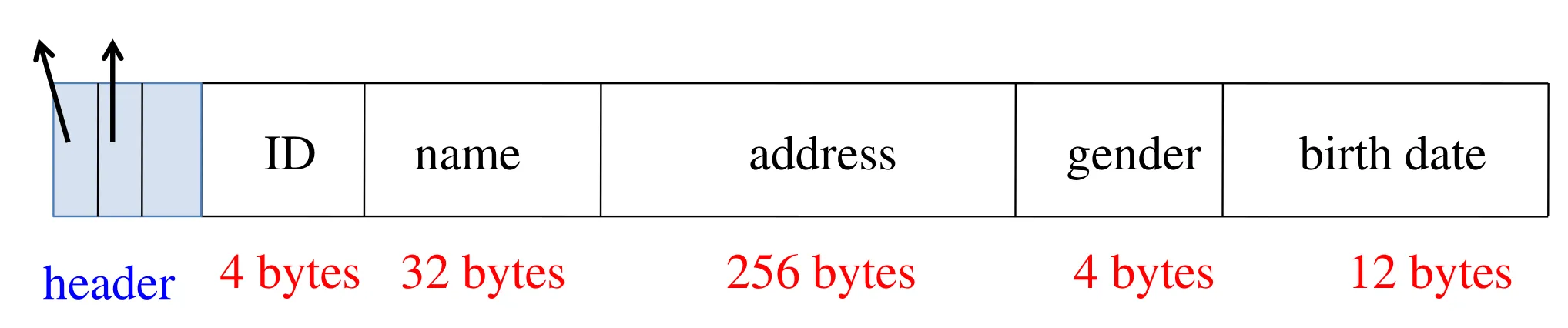
All fields in a record are aligned to start at 4- or 8-byte boundaries & concatenated
-
-

-
Each record has a header holding some info
-
Two types of records: fixed-length and variable-length
-
Different fixed-length records have the same size
-
Different variable-length records may have different sizes
- VARCHAR (variable characters), VARBINARY, TEXT, BLOB, JSON/XML
-
-
Record header
-
Often it is convenient to keep some “header”
-
information in each record:
-
A pointer to schema information (attributes/fields, types, their order in the tuple, constraints)
-
Length of the record/tuple
-
Timestamp of last modification
-
-
-
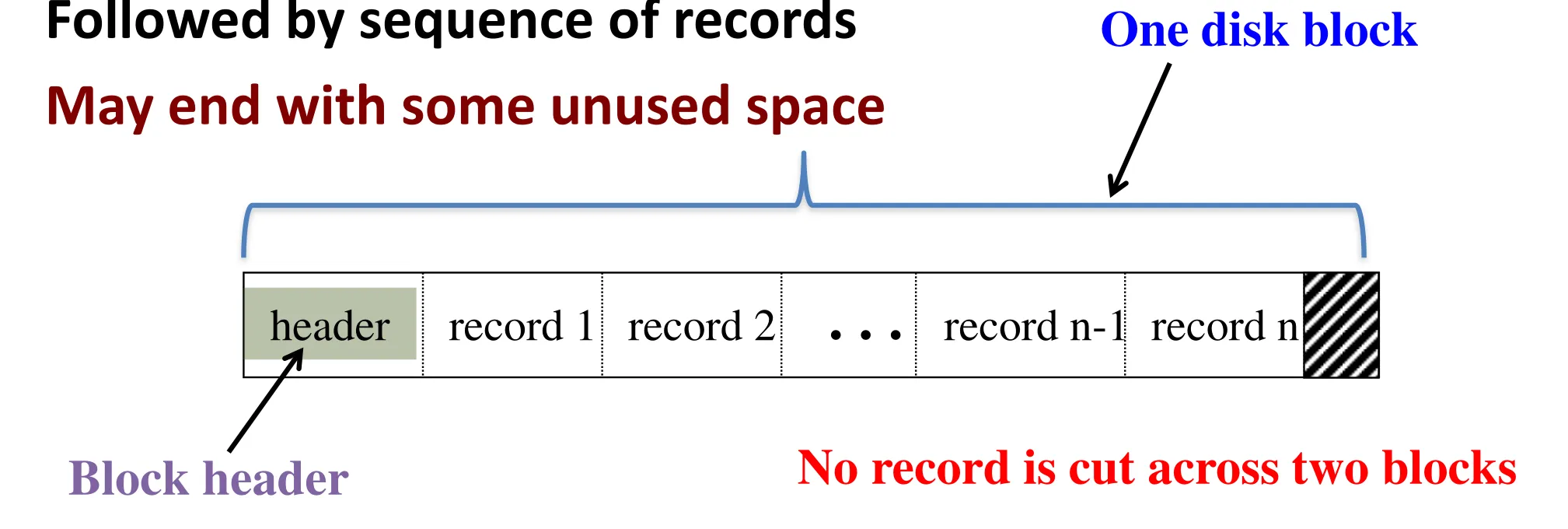
Packing records into blocks
-
Start with a block header
-
Followed by sequence of records
-
May end with some unused space
-
No record is split between blocks
-
-
Accessing fixed-length records
-
Information about field types are the same for all records in a file; stored in system catalogs
-
Finding i’th record in a block does not require scan over previous records
-
Finding i’th field does not require scan over previous fields
-
-
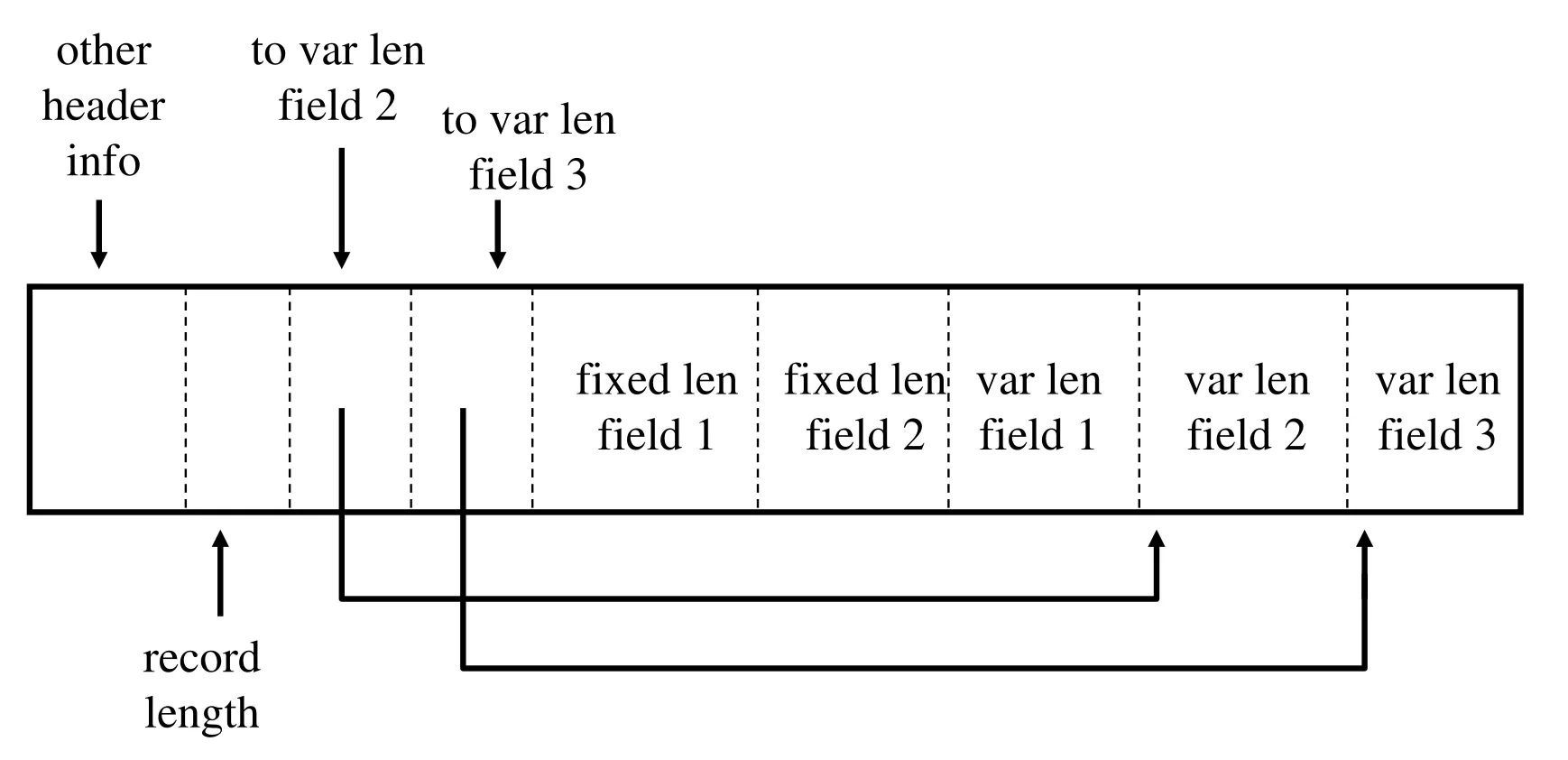
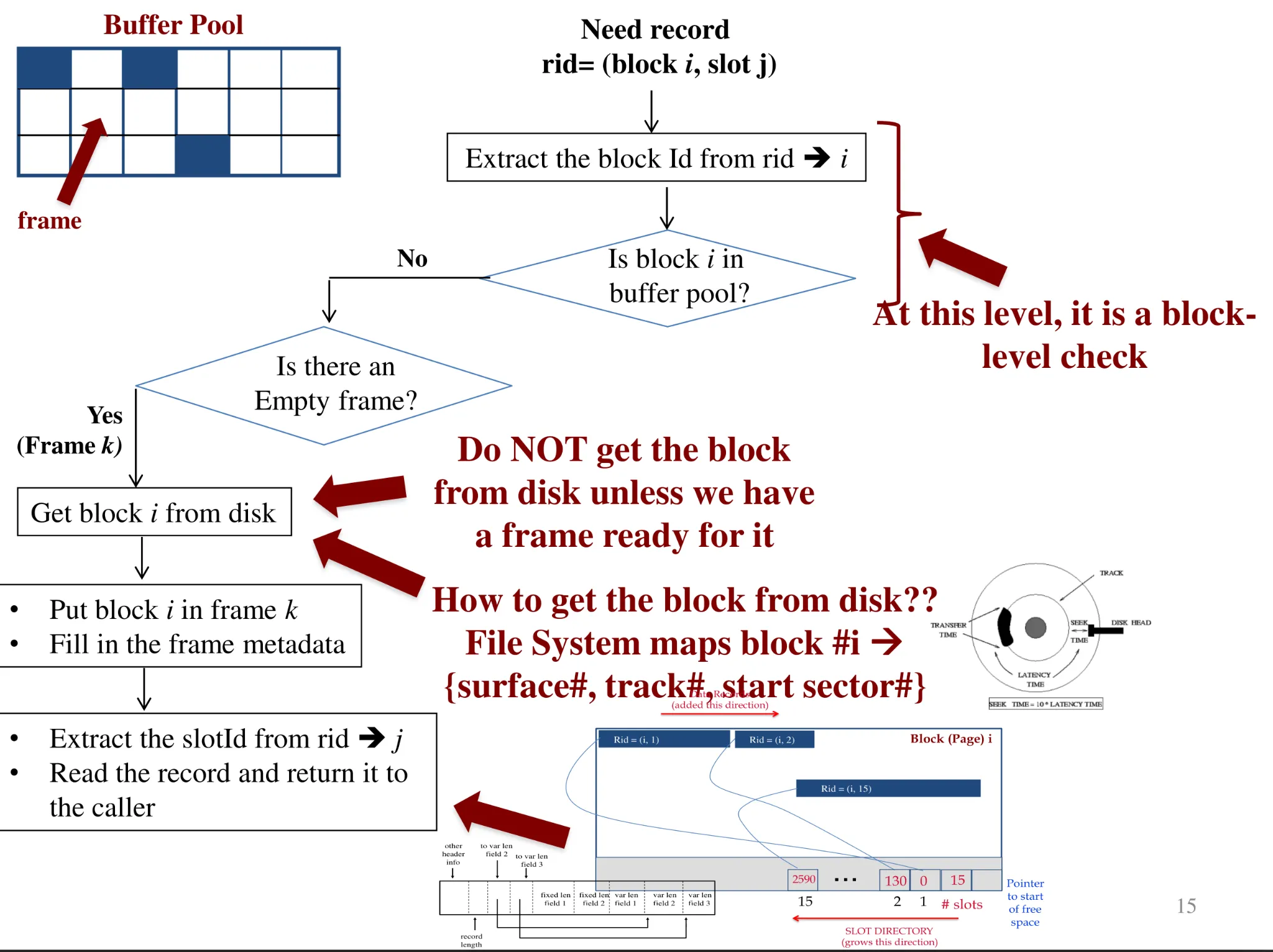
Records with variable-length fields
-
A field whose length can be different across records
-
Complicated design and access, but sometimes efficient to have
-
Effective representation
-
Fixed length fields are kept ahead of the variable length fields
-
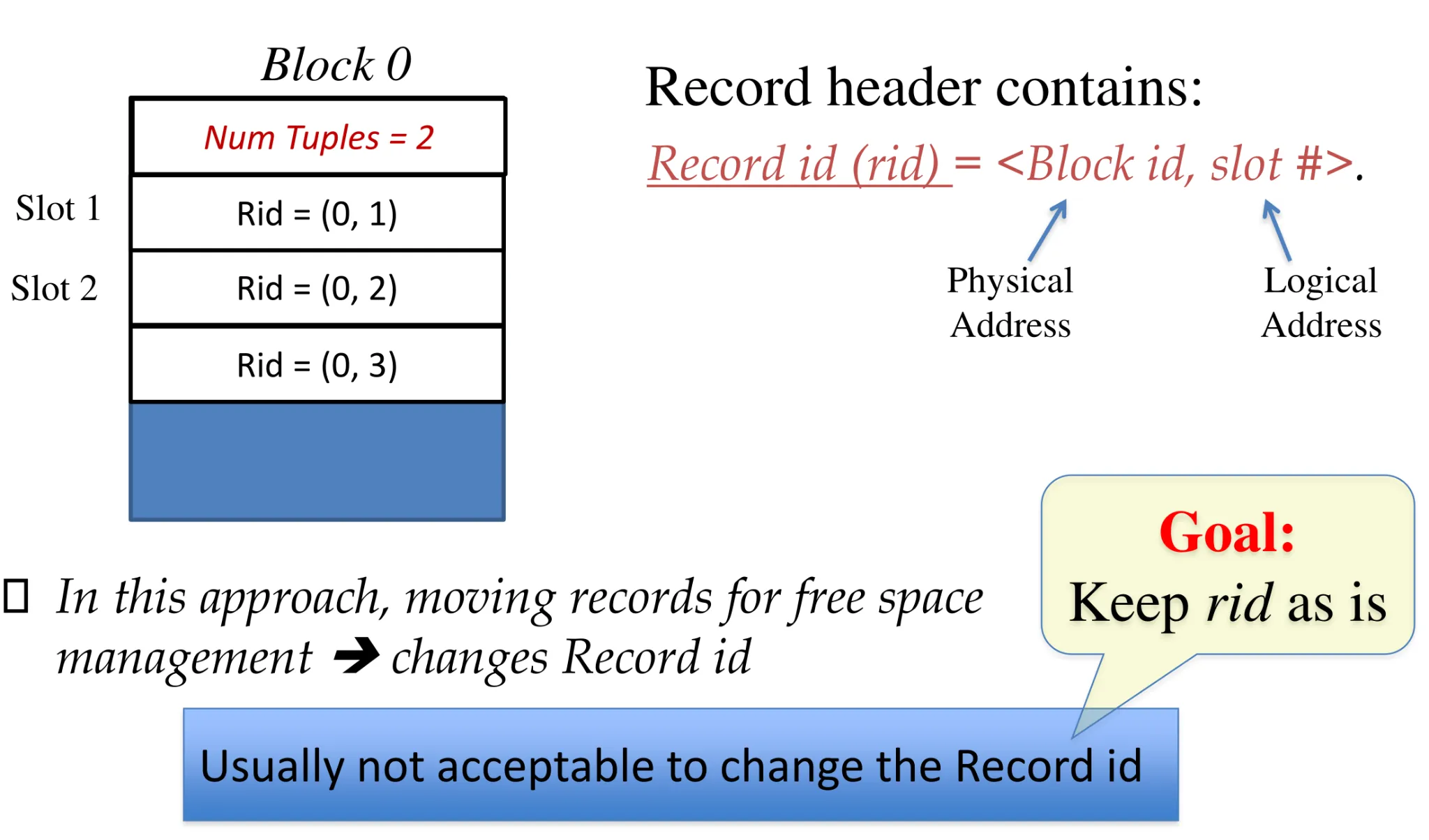
Record header contains
-
Record length
-
Pointers to beginning of each variable length field except the first one
-
-
-
-
Efficient access → still reading i’th record without scanning over previous fields
-
Packing records into blocks
-
Packed approach (fixed-length records)
-
Packed means no holes between records
-
Insertion
-
If enough free space at the end the insert in this block
-
Increment number of tuples in block header
-
-
Deletion
-
Move the last record to fill in the empty space
-
Decrement N
-
-
-
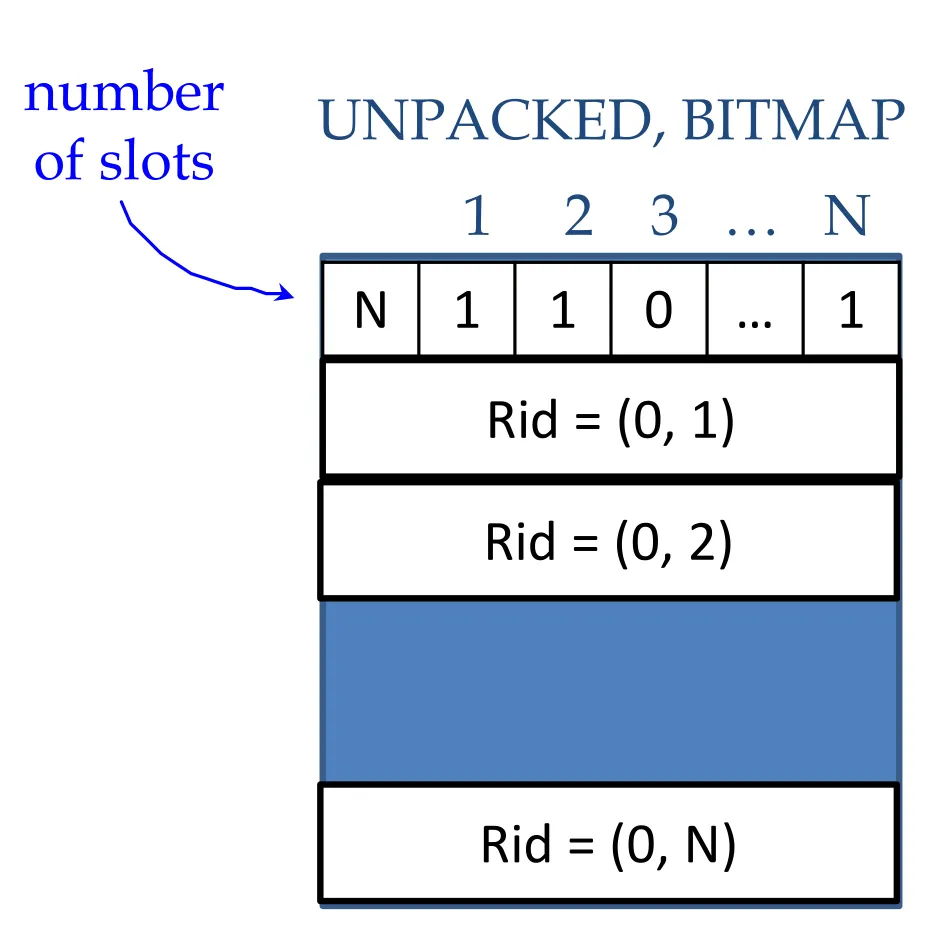
- Bitmap/unpacked approach (fixed-length records)
-
Insertion
-
Find free slot anywhere in the block
-
Insert the record
-
Increment N
-
Set its free bit to 1
-
-
Decrement
-
No copying/movement
-
Decrement N
-
Set its bit to 0
-
-
Better approach, but does not work for variable-length records
-
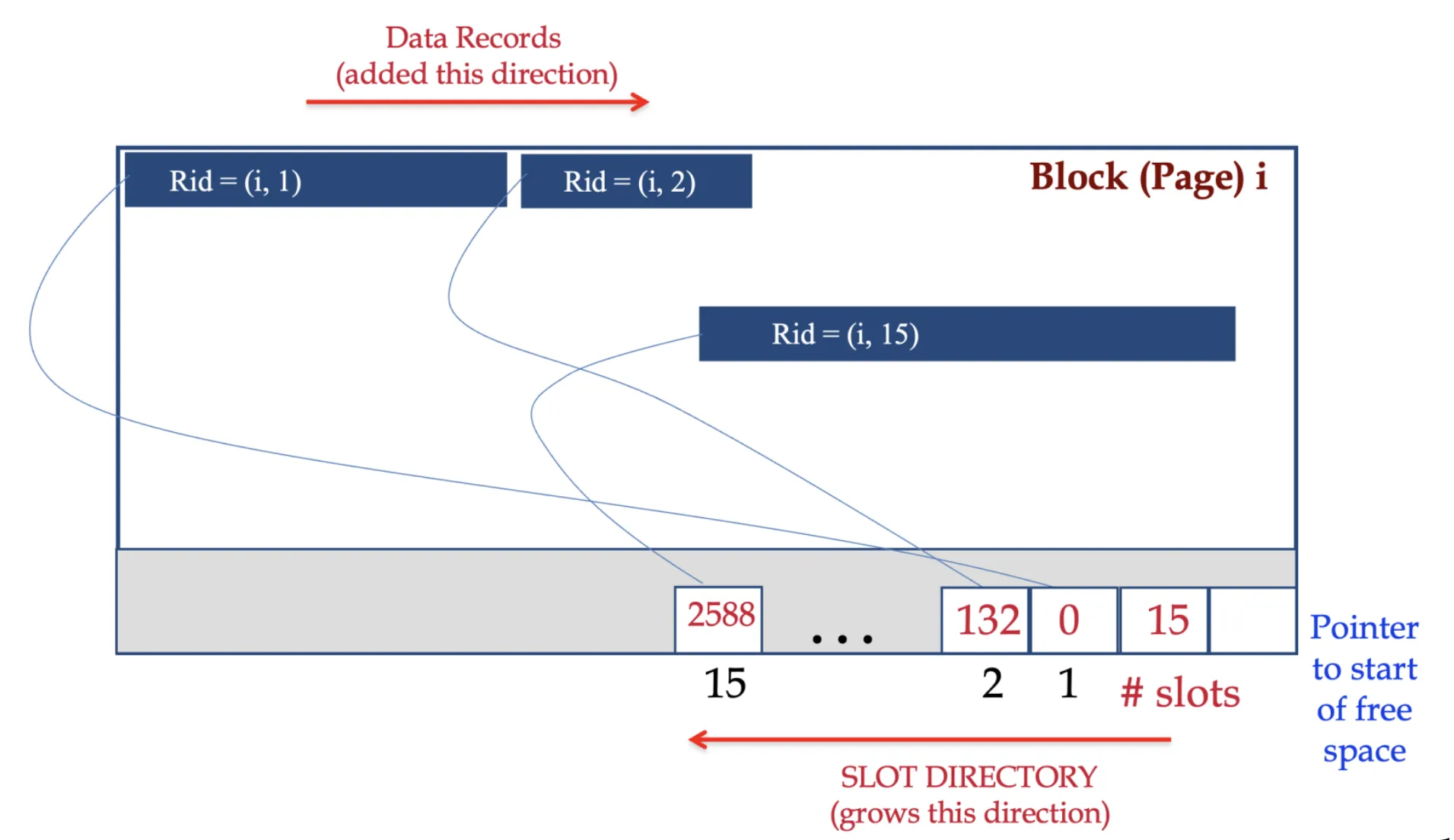
Variable-length records
-
The slot directory starts from one end and grows as needed
-
The data records start from the other end (No need for fixed allocation for SLOT directory)
-
Rid does not change even if the record moves within the block
-
Deleting a record will leave some empty space in the middle
-
Buffer manager
-
Index/file/record manager issues page commands to buffer manager
-
Buffer manager manages what blocks should be in memory and for how long
- Computations/modifications on/to data pages can only be made when they are in main memory, NOT on disk
-
Insight: [https://chatgpt.com/share/67e6ed51-0ea0-800b-8680-f5e888d3780b]](https://chatgpt.com/share/67e6ed51-0ea0-800b-8680-f5e888d3780b)
-
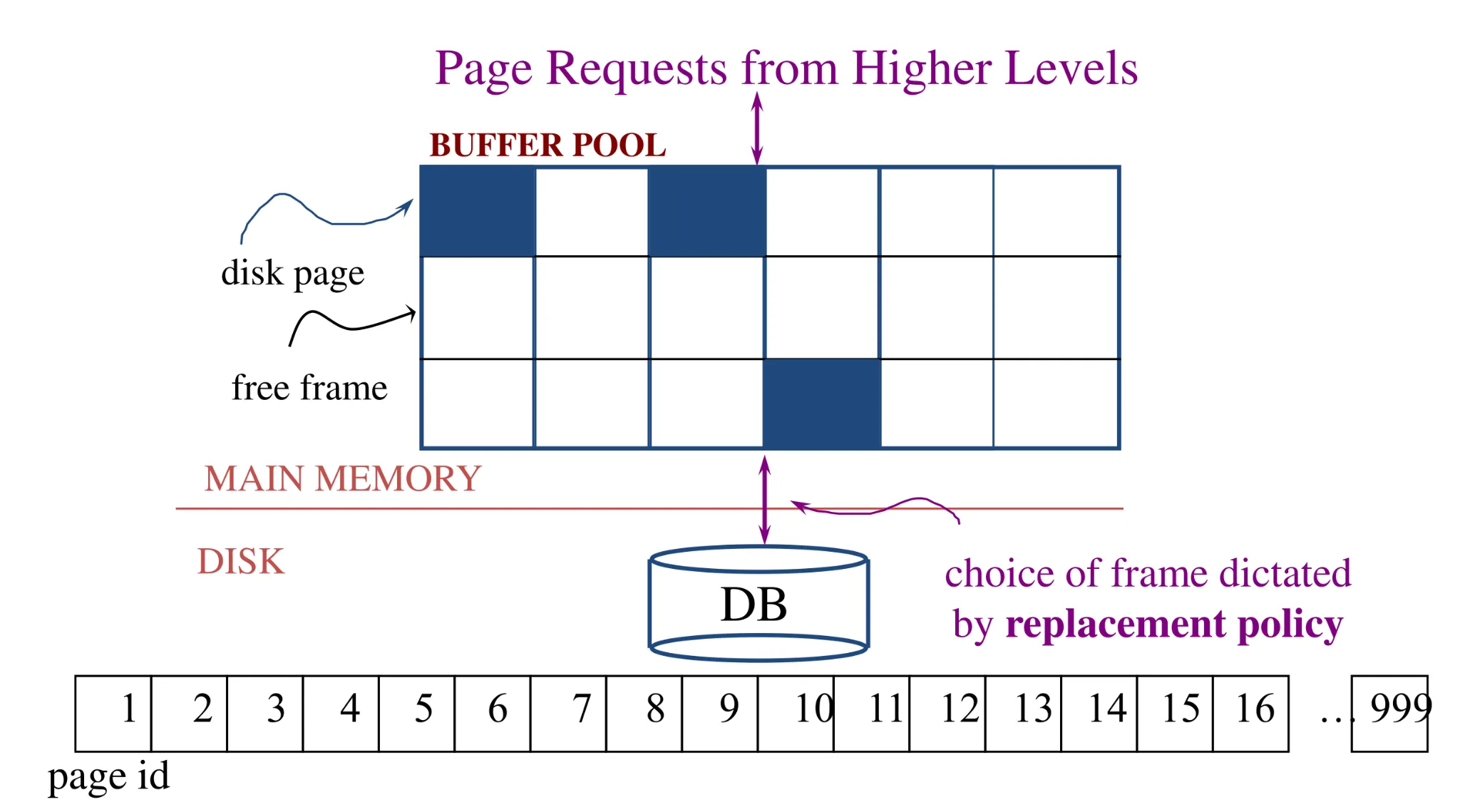
Buffer pool
-
Array called buffer pool, each entry is called frame
-
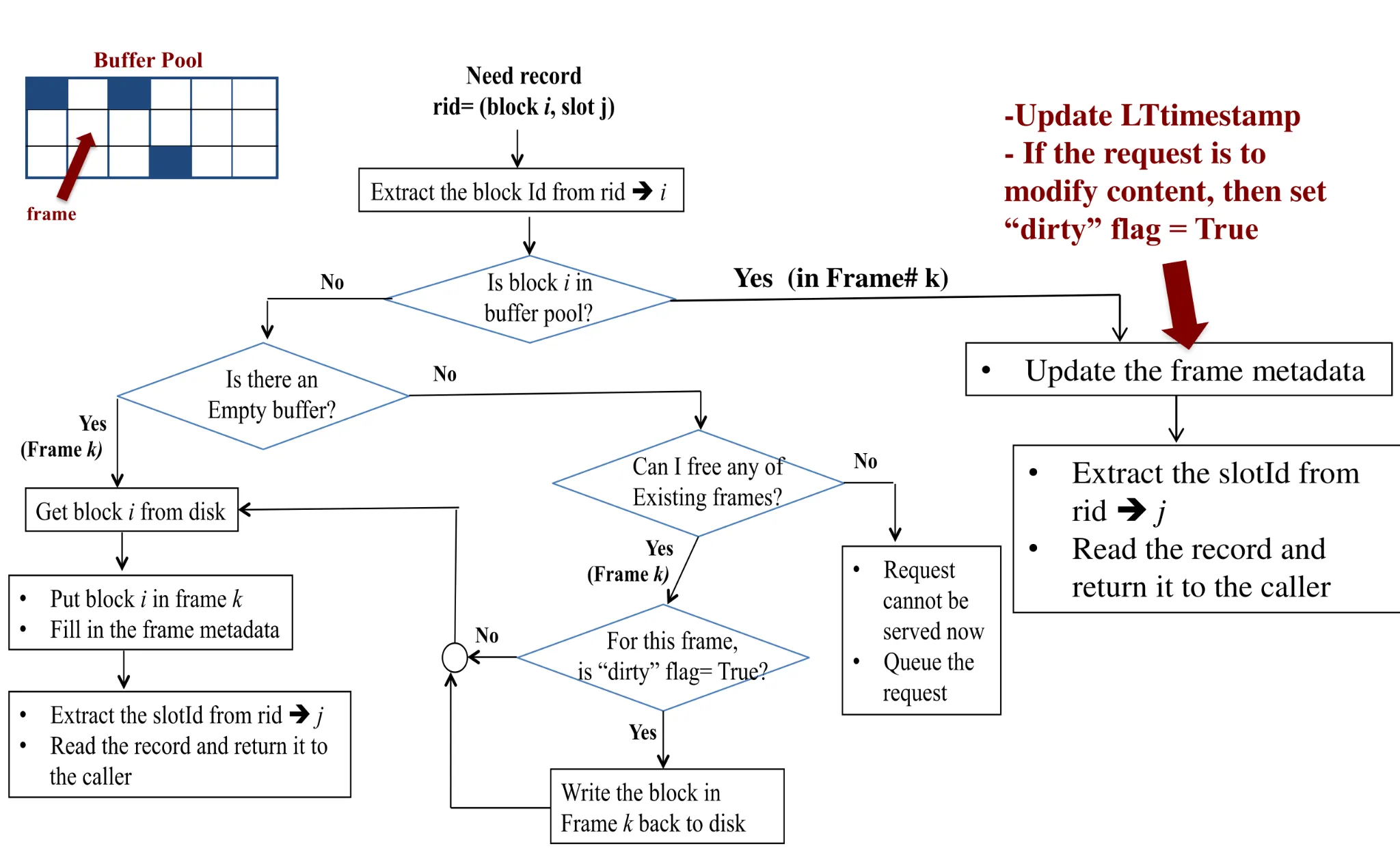
Buffer pool information table contains: <frame number, disk page ID, pin count, dirty>
-
Dirty: whether the content has changed
-
Pin: can be taken out if need and count = 0, else has to stay in-memory until unpinned
-
LTTimestamp: last touched (R+W) timestamp
-
-
Each entry can hold 1 database disk block
- An in-memory disk block is a.k.a. memory page
-
Buffer manager keeps track of
-
Which pages are empty
-
Naive: scan array of frames looking for blockId -1 (O(n))
-
Better: array of empty frames
-
Even better: bitmap of which frames are used (O(1))
-
-
Which disk page exists in which frame
-
Naive: scan array of frames looking for blockId i (O(n))
-
Better: hashmap blockId → frame number (O(1))
- No need to keep blockId in frame metadata anymore
-
-
-
-
How do we choose which frame to free among the unpinned ones? Buffer replacement policies
-
LRU, FIFO, clock replacement algorithm
-
Have a big impact on number of I/O’s → depending on the access pattern
-
Also may need additional metadata to be stored for each frame
-
LRU
-
For each frame in buffer pool, keep track of time when last accessed ➔ (LTtimestamp)
-
Replace the frame which has the oldest (earliest) time
-
Very common policy: intuitive and simple
- Works well for repeated accesses to popular pages
-
-
Clock
-
An approximation of LRU
-
Each frame has
-
Pin count ➔ If larger than 0, do not touch it
-
Ref bit (second chance bit) ➔ 0 or 1
-
-
Imagine frames organized into a cycle
-
A pointer rotates to find a candidate frame to free
-
IF pin-count > 0 Then ➔ Skip
-
IF (pin-count = 0) & (Ref = 1) ➔ Set (Ref = 0) and skip (second chance)
-
IF (pin-count = 0) & (Ref = 0) ➔ free and re-use
-
-
Need additional metadata
- Second chance (reference bit)
-
Small overhead
-
-
Problem: sequential flooding
-
Queries can involve repeated sequential scans
-
# free buffer frames < # pages in file means some page requests cause an I/O.
-
High cost ➔ Each access modifies the metadata
-
Affects both LRU and Clock Replacement
-
-
-
Pinning memory pages
-
Pinning a page means not to take from the memory until unpinned
-
Why pin a page?
-
Keep it until the transaction completes
-
Page is reference a lot
-
Recovery control
-
Concurrency control (enforcing certain order)
-
-
Releasing unmodified pages
-
When done with a page
-
Unpin the page (if you can)
-
Since page is not modified → claim this page in the free list
-
No need to write back to disk
-
-
-
Releasing modified pages: have to notify the disk manager to modify the corresponding on-disk block afterward
-
-
Sorting in main memory
-
In DBMS, the data can be much larger than main memory
-
Why sort?
-
Data requested in sorted order
-
Many DB operations require sorting
-
-
Using secondary storage effectively
-
General wisdom
-
I/O costs dominate
-
Design algorithms to reduce I/O
-
CPU overhead becomes less important
-
-
-
Merge sort
-
In-memory: EZ
-
Externally (using disk)
-
How many memory buffers are needed?
-
What is the I/O cost?
-
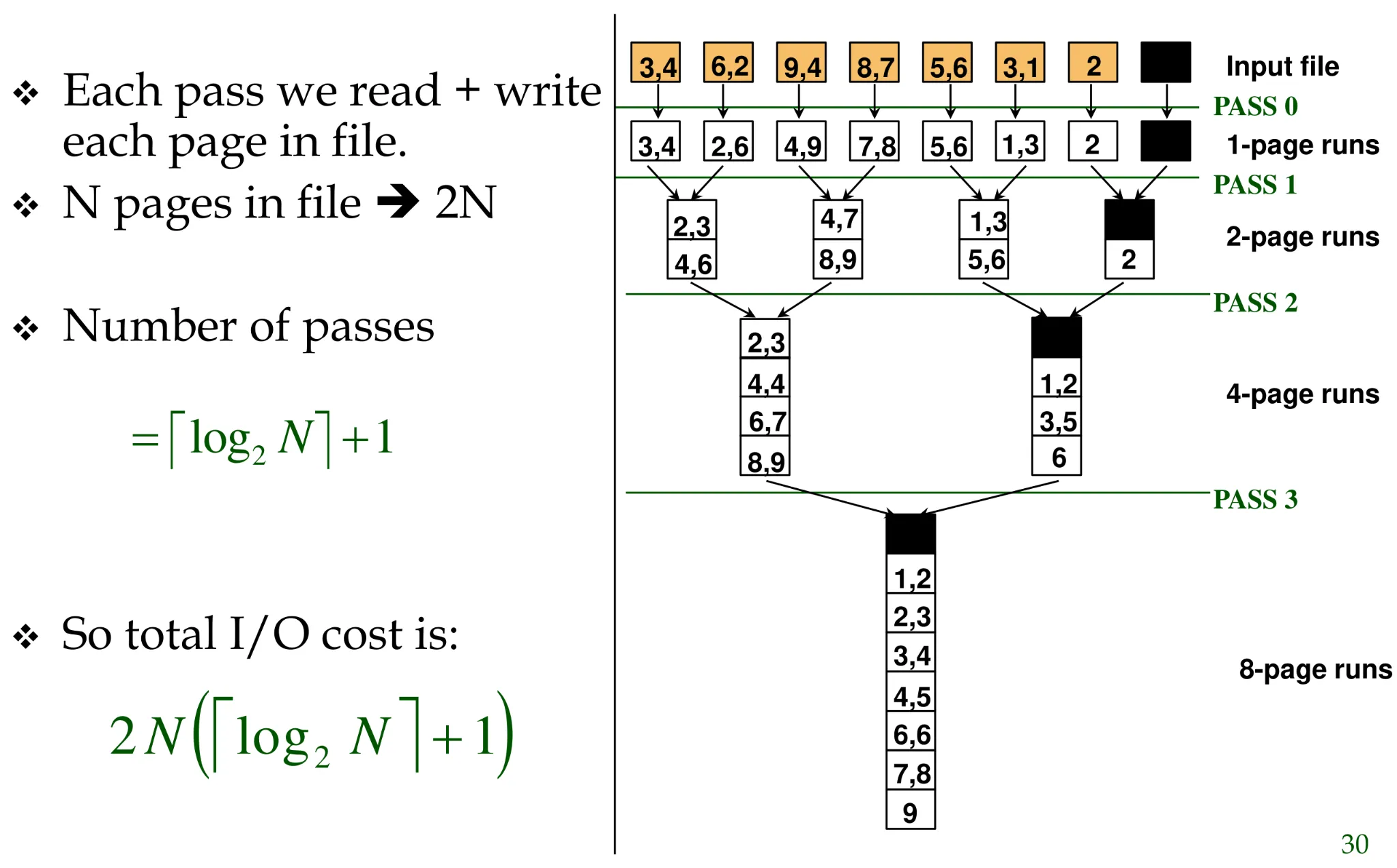
2-way external sort (Naive method)
-
Phase 1: Prepare
-
Read a page, sort it, write it
-
Only one buffer page is used
-
-
Phase 2, 3…(recursively): Merge two sub-lists in each phase
- Three buffer pages used
-
-
-
-
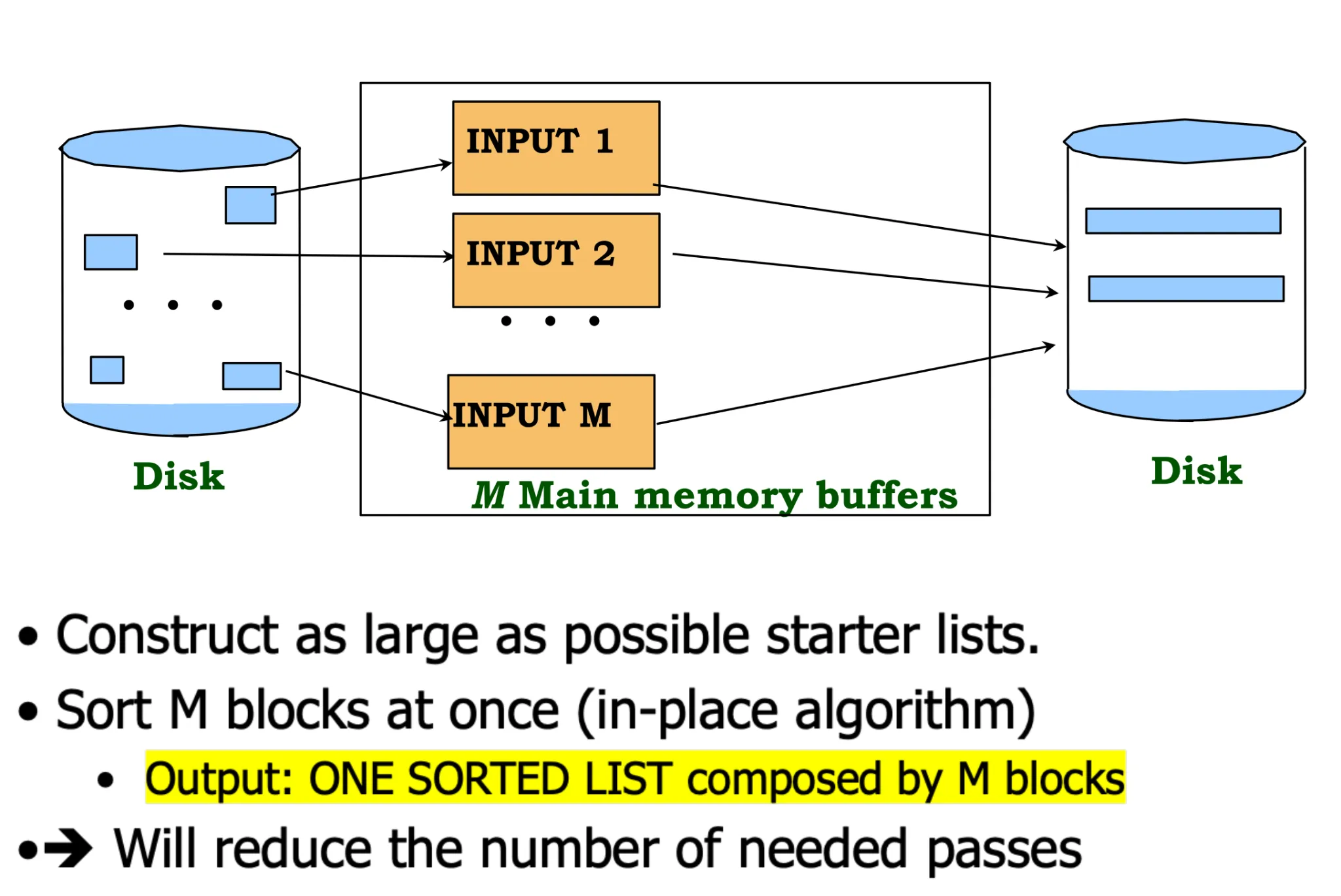
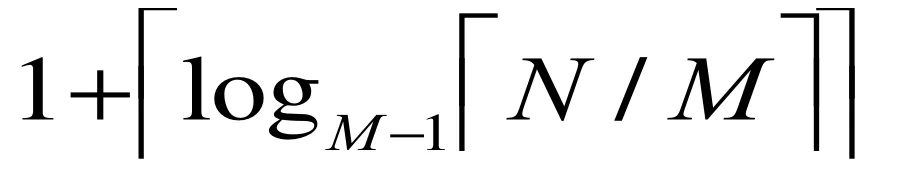
M-way external sort
-
Sorting a file with N pages using M buffer pages
-
Pass 0: use M buffer pages.
- Produce N/M sorted runs of M pages each.
-
Pass 1, 2, …, etc.: merge M-1 runs.
-
-
Number of passes
-
Total I/O cost = 2N * (# of passes)
-
Summary
-
Use as much memory buffers you can
-
Cost metric
-
I/O only (till now)
-
CPU is nontrivial, worth reducing
- Use a quick main-memory algorithm
-
-
For the in-memory sorting part
- Use Quicksort or heapsort
-
-
Indexing
-
Heap file of a relation: storage structure used to store the tuples (rows) of that relation without any specific order
-
Table scan: Naive way
-
Open the heap file of relation R
-
Access each data page
-
Access each record in the data page
-
Check the condition
-
I/O cost: O(N)
-
Memory needed: only 1 memory block
-
Index scans are more efficient, but requires DBMS to index the table beforehand
-
-
Concepts
-
Indexing is used to speed up access to desired data
-
Search key — attribute to set of attributes used to look up records in a relation (WHERE clause in the SQL query)
- Example:
-
-
SELECT id, name, address
FROM R
WHERE id=1000; → Search key
-
Index file
- Consists of records (called index entries) of the format

-
Typically much smaller than the data file it’s indexing
-
Types of indexes
-
Dense vs sparse
-
Primary vs secondary
-
One-level vs multi-level
-
-
Index evaluation metrics
-
Saves query times, but adds overhead to insertion, update/deletion, and space
-
Supported access patterns
-
Equality search (x = 100): records with a specified value in the attribute
-
Range search (10 < x < 100): records with an attribute value falling in a specified range of values.
-
-
-
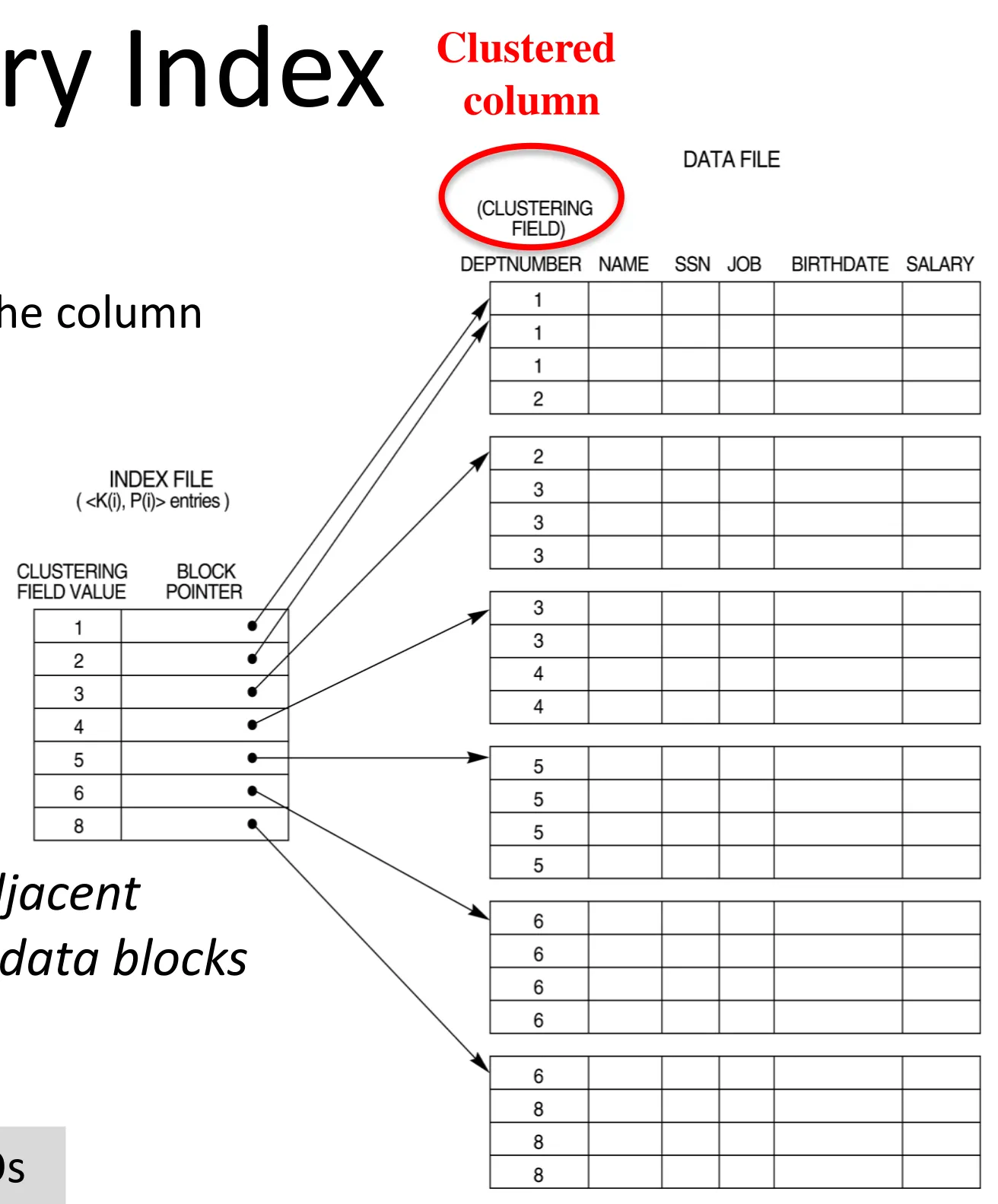
Primary index
-
An index on the ordering column (the column on which the data file is sorted)
-
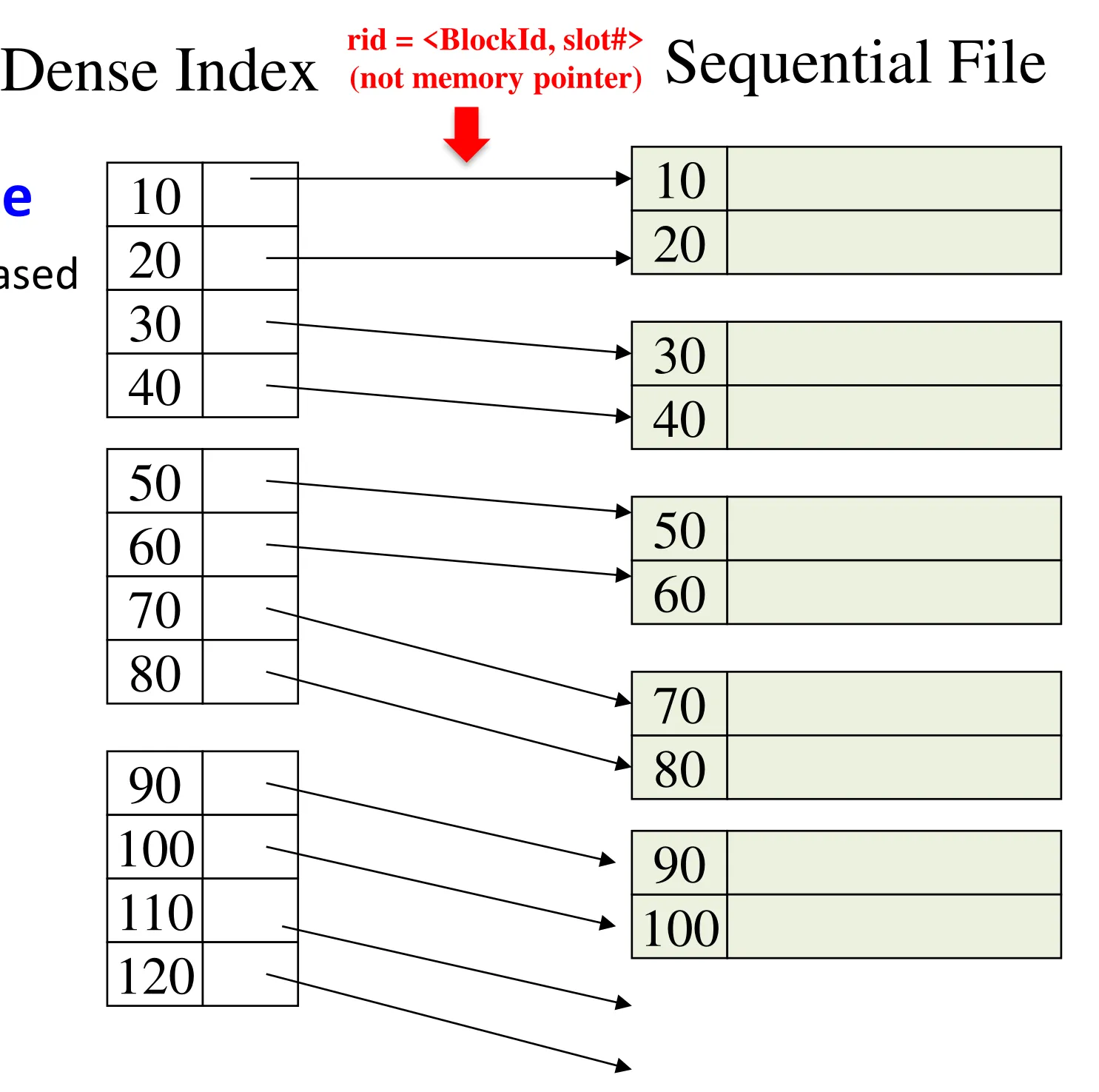
Dense index in ordered file
-
Ordered (sequential) files
- Records are stored sorted based on the indexed attribute
-
Dense index
- Has one entry for each data tuple
-
-
-
Number of entries in index = records in file
-
But index size is much smaller (since only 2 columns)
-
Index scan
-
Read each page from the index
-
— Search for key = 100
-
— Follow the pointer ➔ (Record Id)
-
-
Index binary search
-
Since all keys are sorted
-
Read middle page in index
-
Either you find the key, or
- Move up or down
-
-
Sparse index in ordered file
-
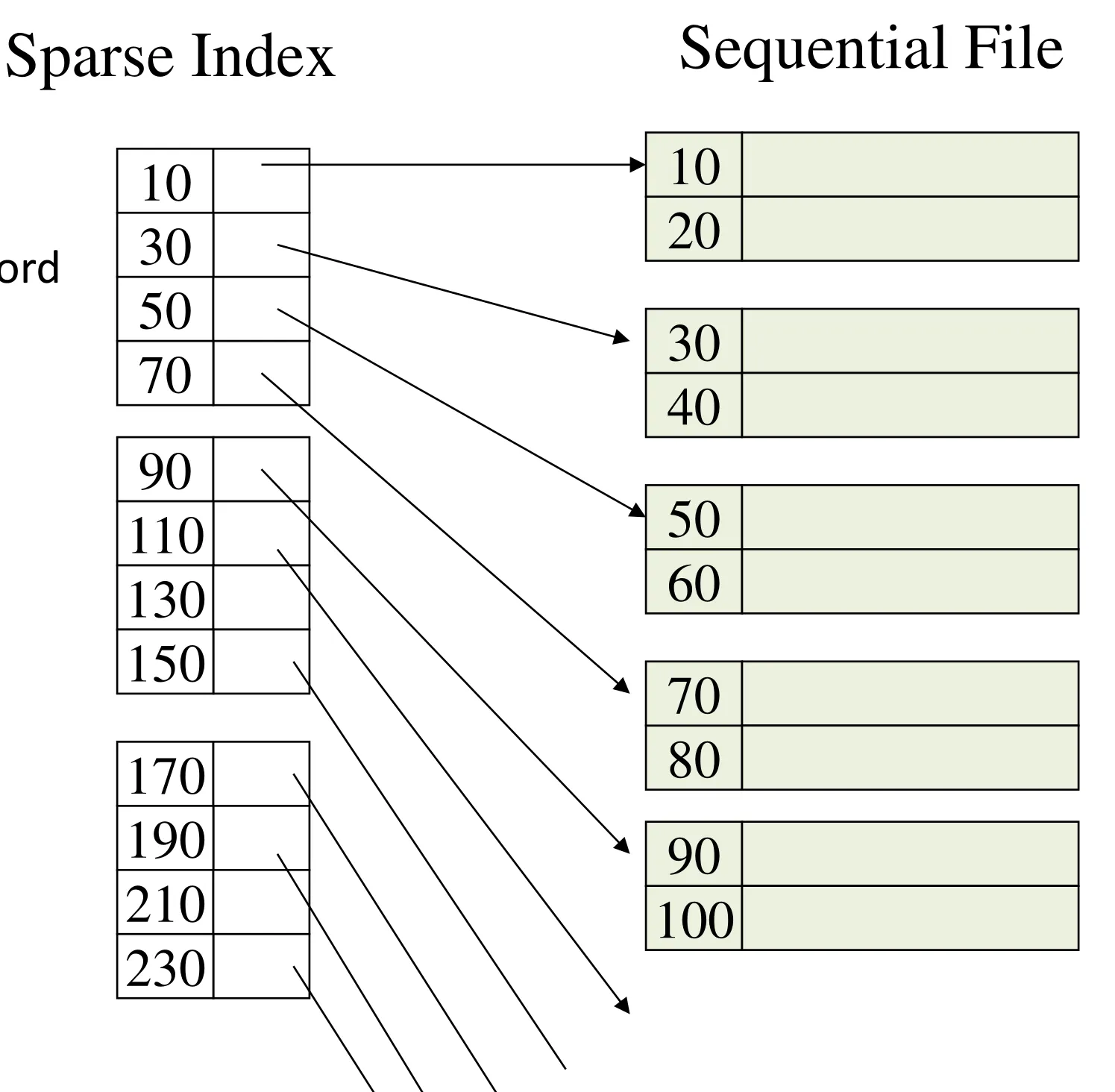
Sparse index
-
An entry for only the 1rst record in each data block
-
Much smaller than a dense index
-
Can only be built on ordered (sequential) files
-
-
Index binary search still works
-
Either locate the search key in the index, OR
-
Locate the largest key smaller than your search key
-
Follow the pointer and check the data block
-
-
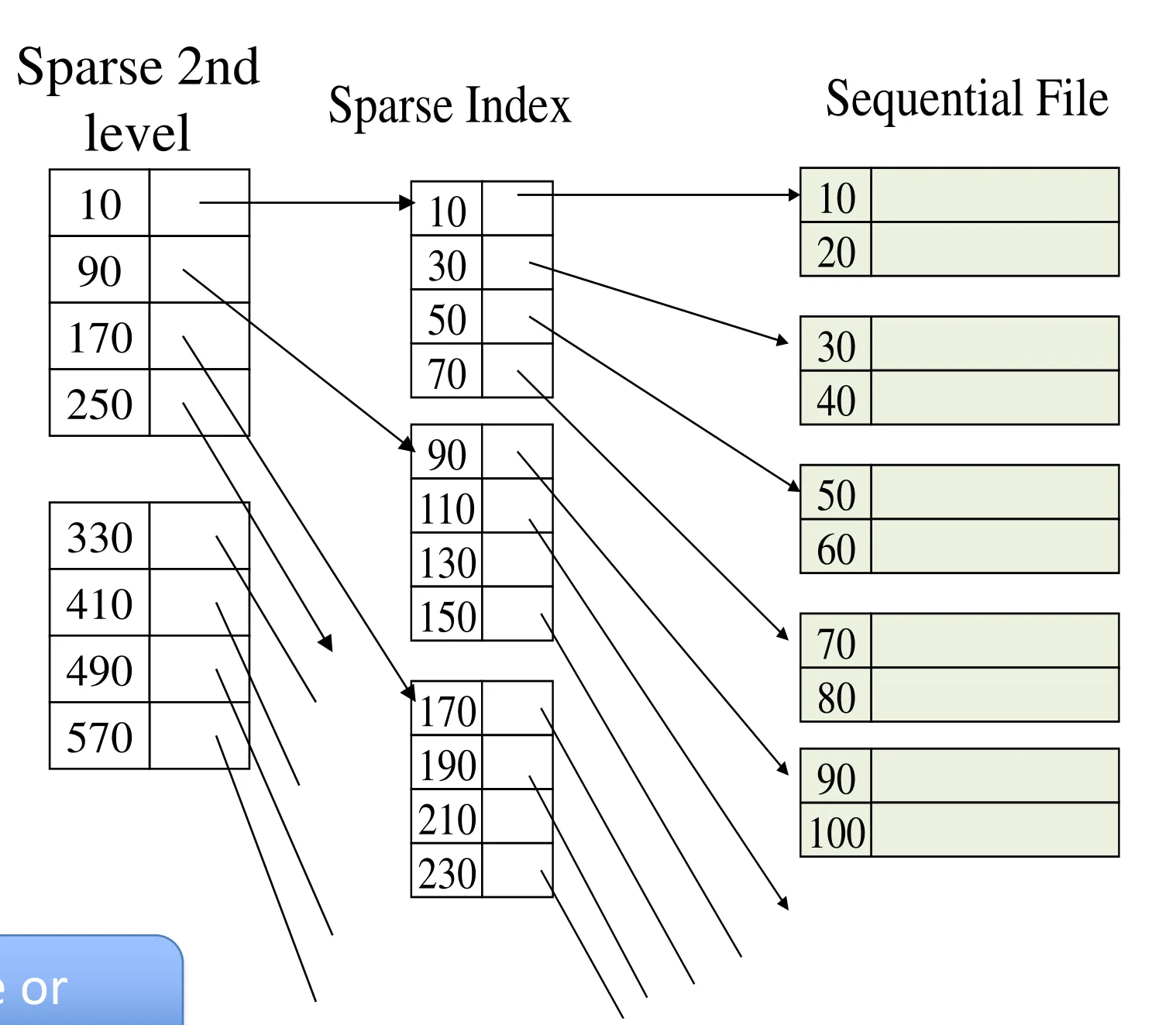
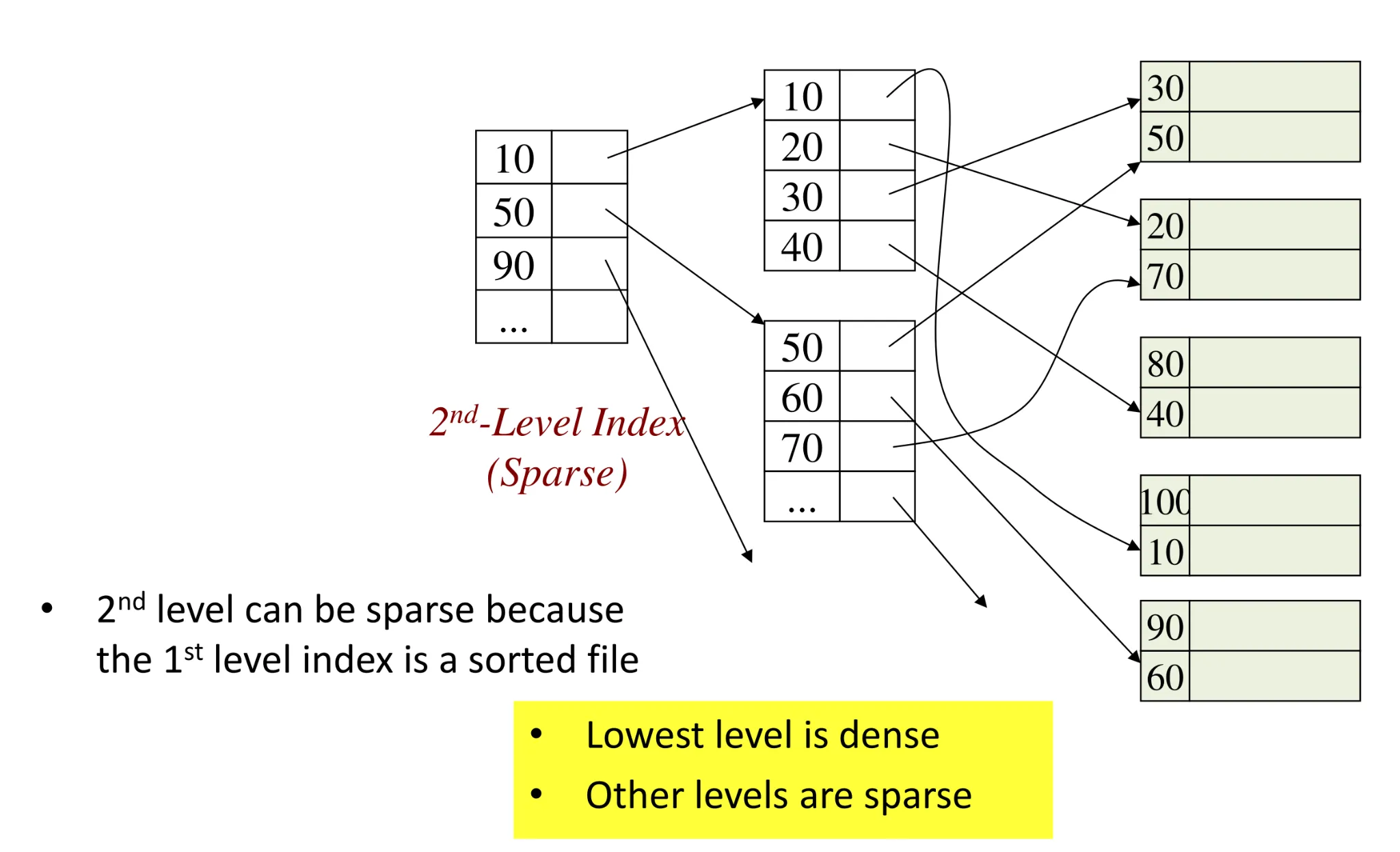
Multi-level index
-
1st level Index file is just a file with sorted keys
- We can build a 2nd level index on top of it
-
Beyond the 1st level (which can be dense or sparse), all following levels should be sparse to save on space
-
Sparse vs dense index
-
Sparse
-
Less space
-
Only for sorted files or higher-level indexes
-
Better for insertion
-
Cannot tell if record does not exist without checking data file
-
-
Dense
-
More space
-
Must use for unsorted files (secondary indexes)
-
Can tell if record does not exist without checking the data file
-
-
-
Insertion/deletion in ordered file
-
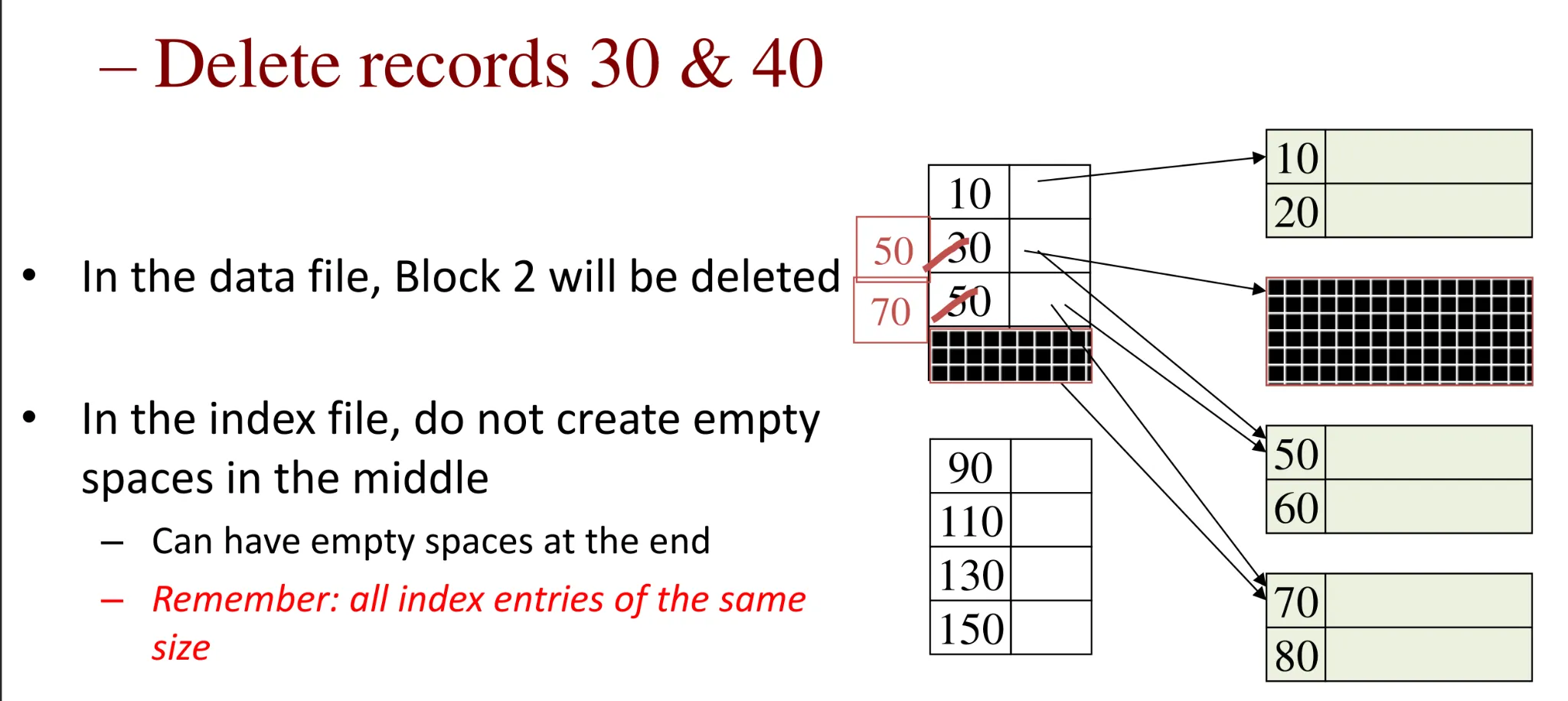
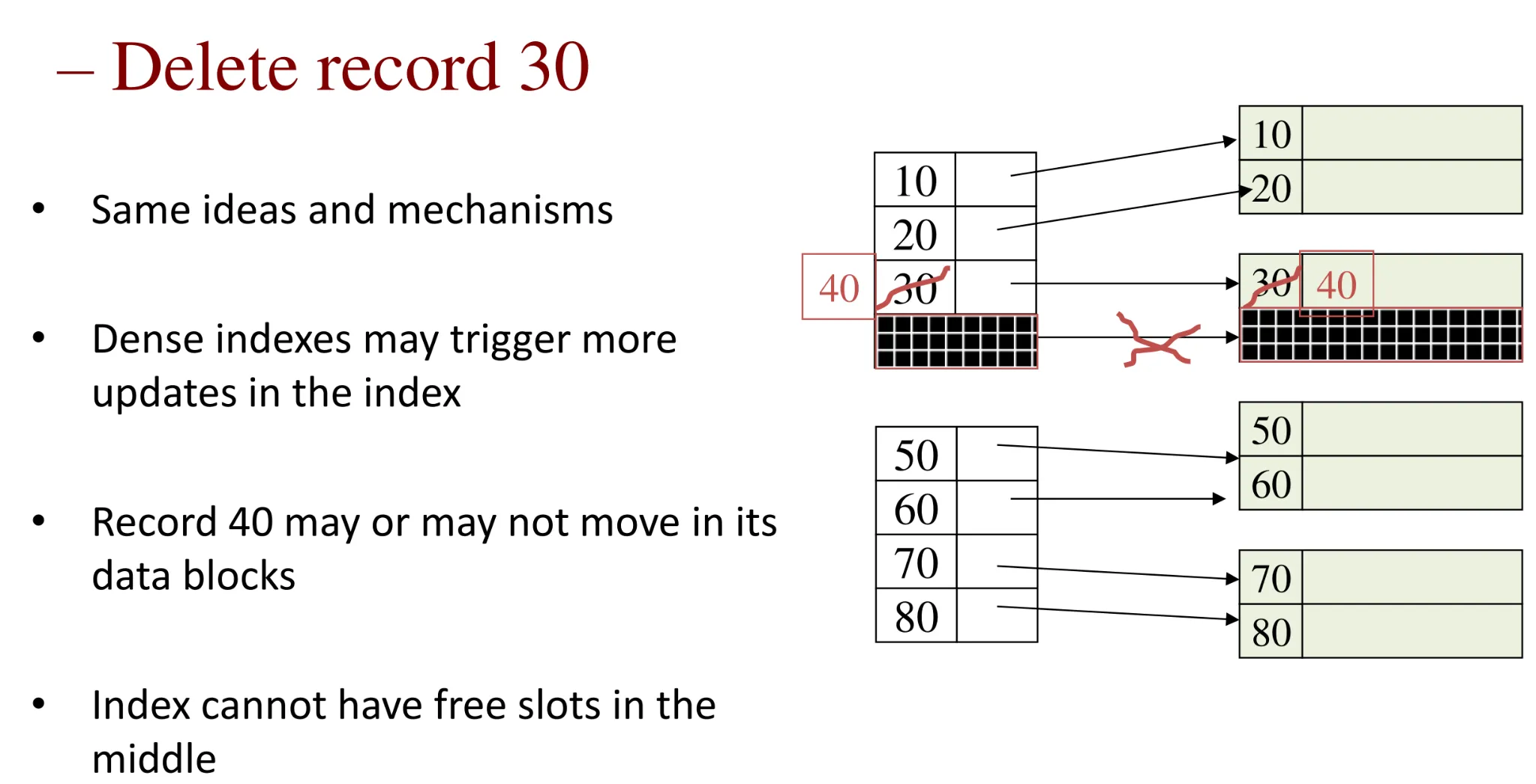
Sparse index: deletion
-
If deletion were not an indexed record, index requires no re-organization
- Data blocks will have some empty space
-
If deletion were an indexed record (1rst entry in the data block), the search key value in the index entry will change to the new 1rst entry in the data block
- The 1rst entry may or may not move
-
-
- Dense index
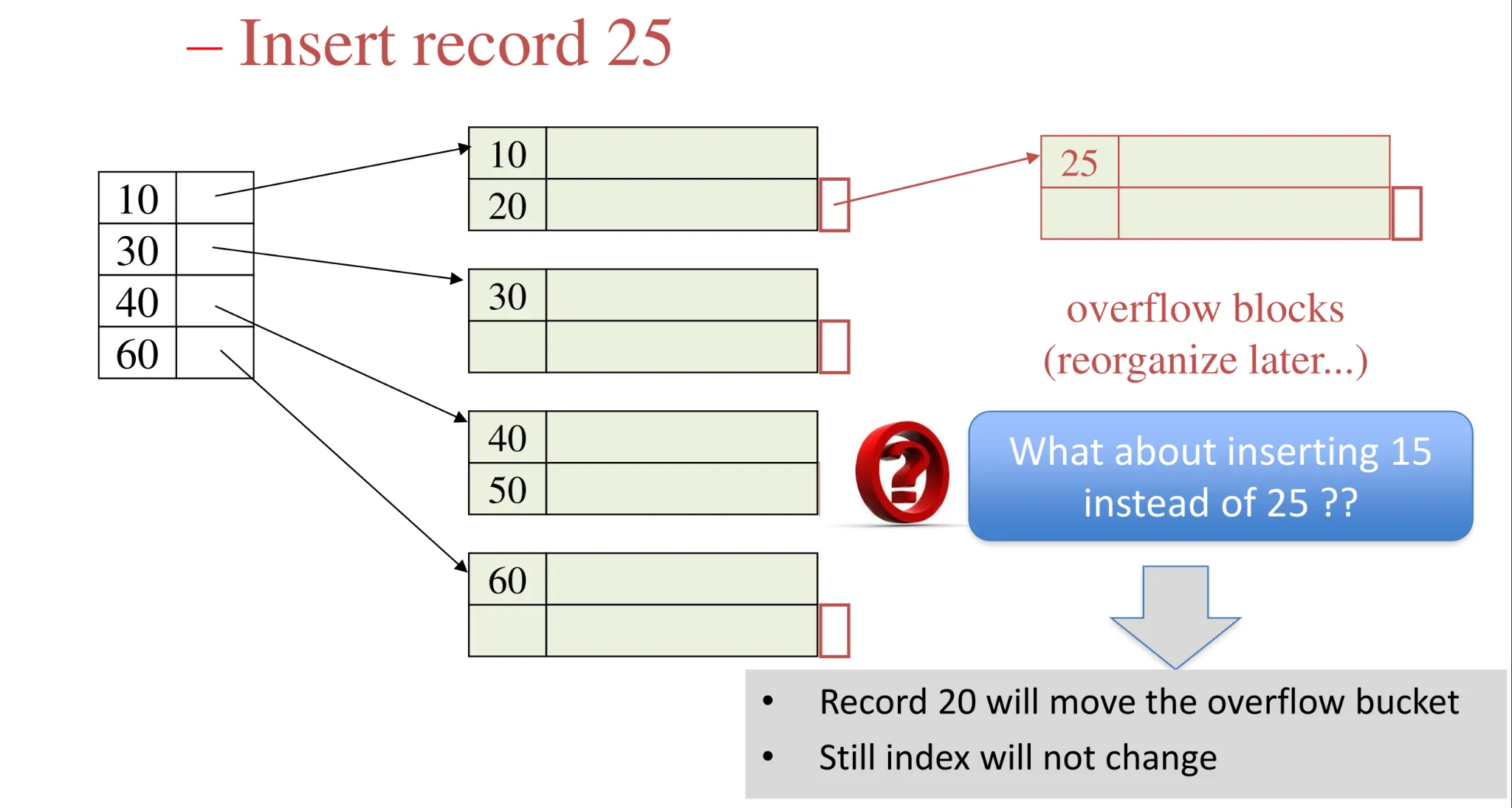
- Sparse index: insertion
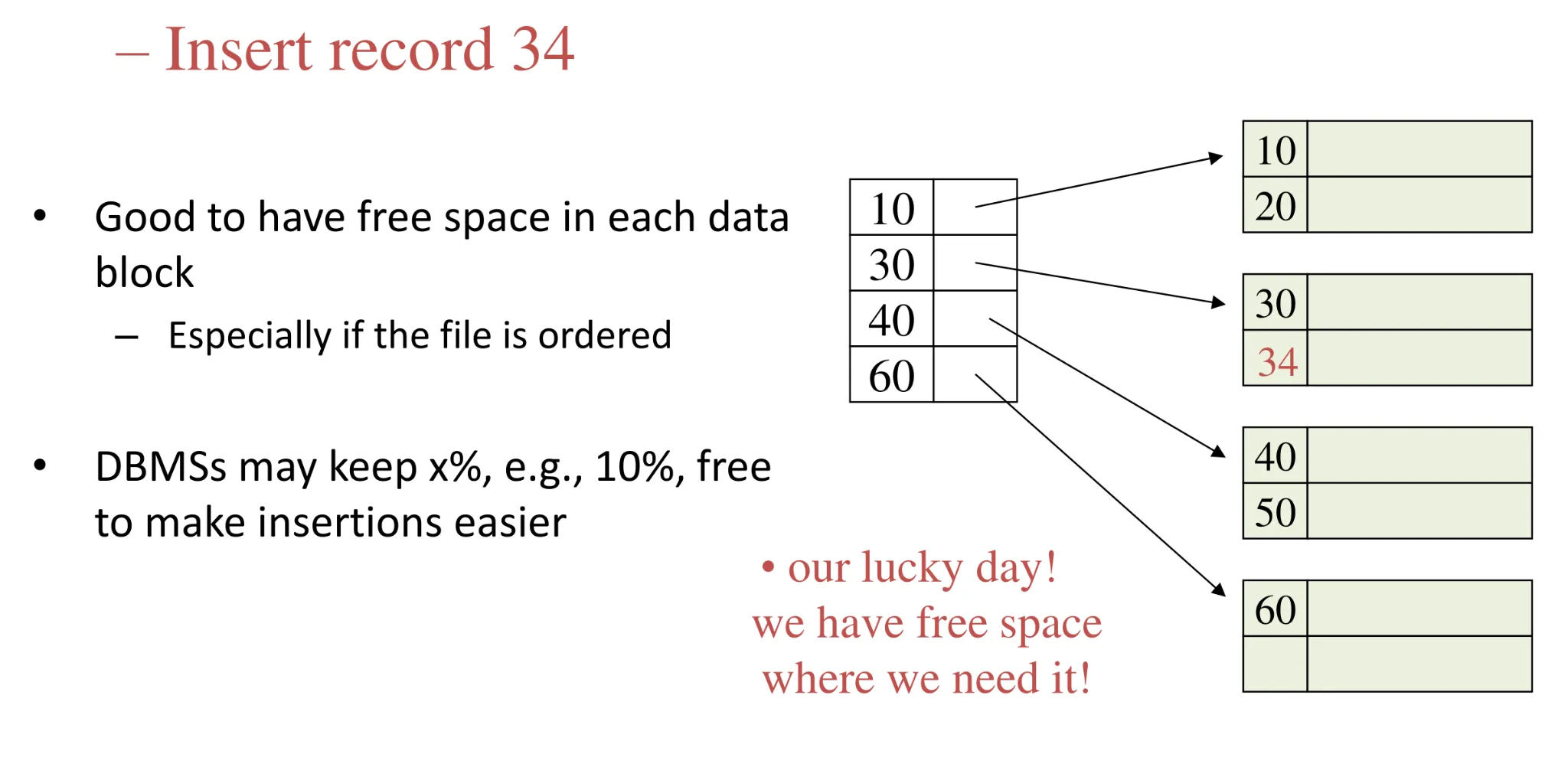
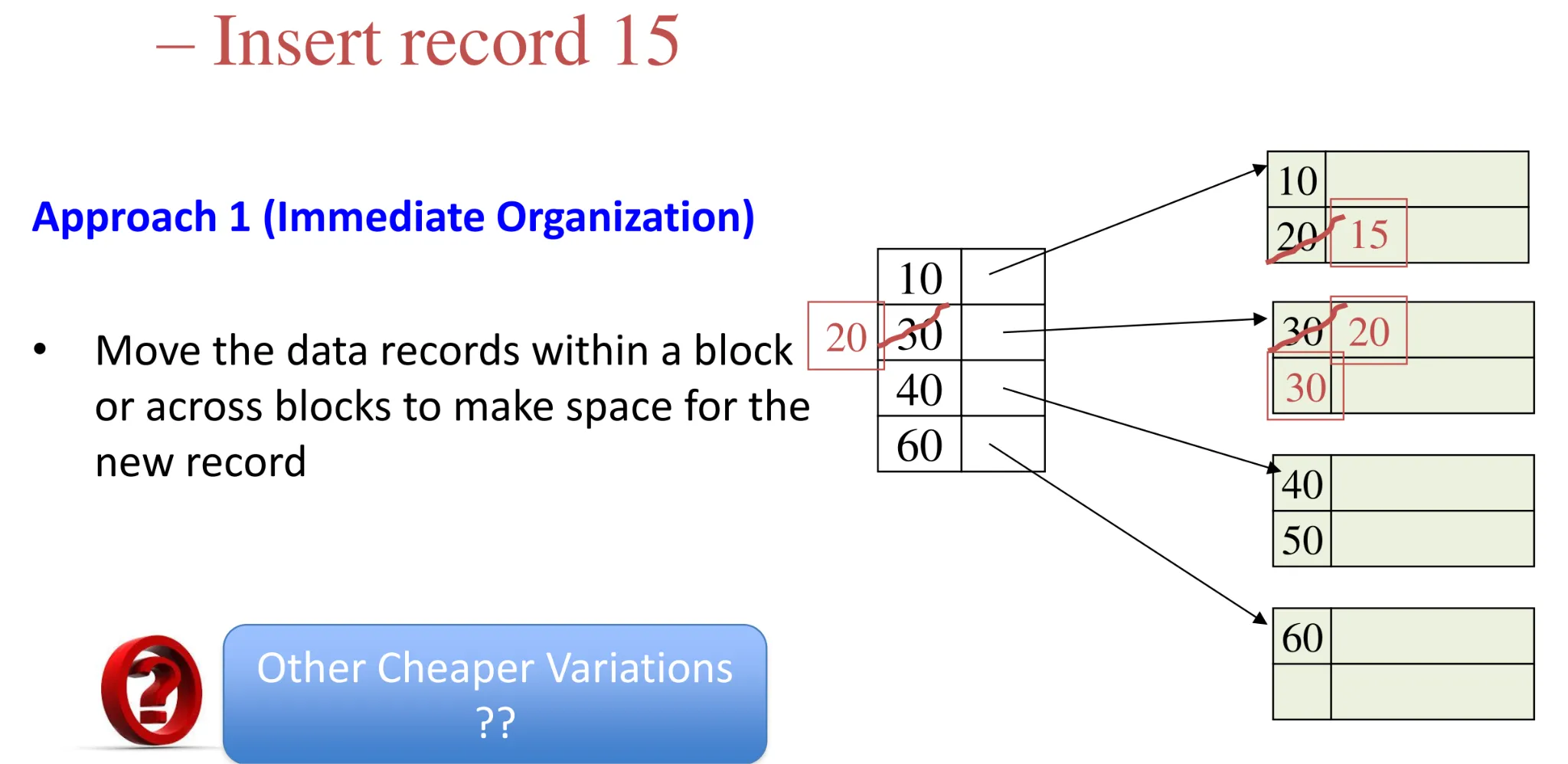
-
Use of overflow blocks
- Overflow blocks are invisible to the index (do not affect the index entries)
-
Dense index: insertion — similar, often more expensive
-
Primary vs secondary index
-
Primary index
-
An index on the ordering column (the column on which the data file is sorted)
-
Can be dense or sparse
-
Can be one-level or multi-level
-
Big advantage
- Records having the same key (or adjacent keys) are in the same (or adjacent) data blocks → Leads to sequential I/Os
-
-
-
Unordered files
- File where records are not ordered on the indexed column
-
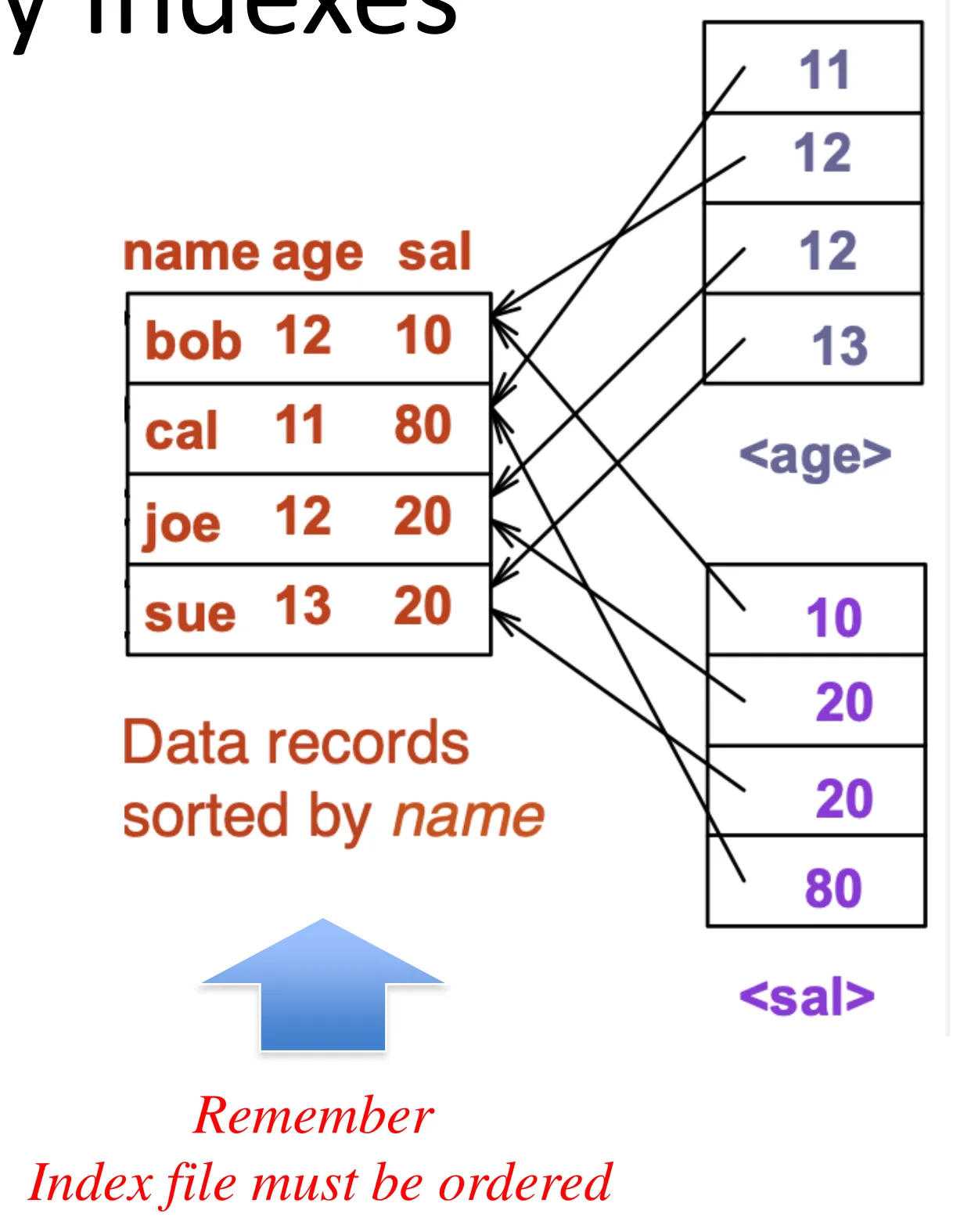
Secondary index
-
An index on a relation’s unordered (physically) column
-
The file may be ordered on another column, say Name.
-
An index on the Name column is primary index (Can be sparse or dense)
-
An index on any other column, say ID, is called secondary index (can only be dense)
-
-
An index entry for each data record
-
Pointers will cause random I/Os (even for same or adjacent values)
-
- Multi-level secondary index
-
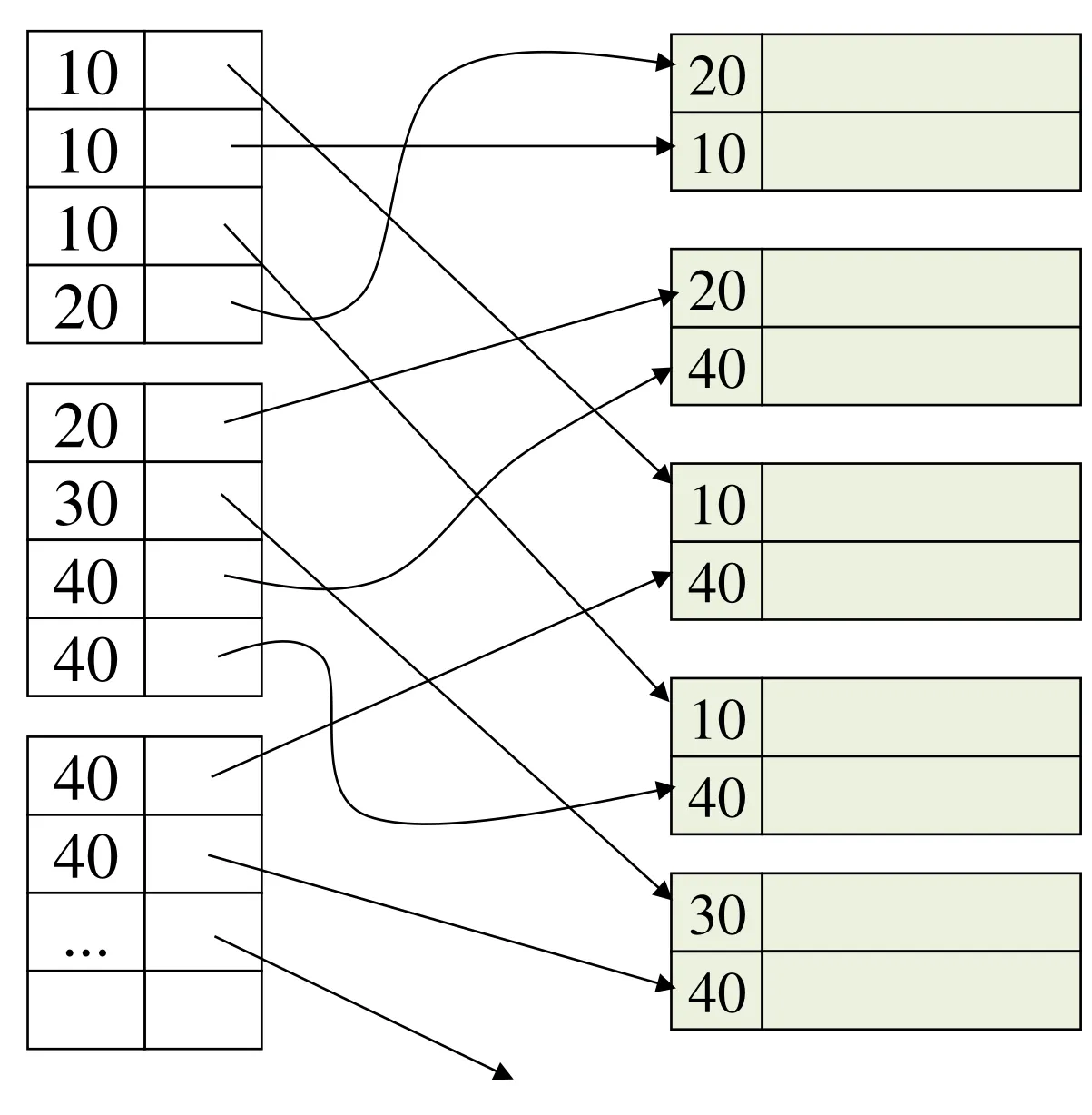
Duplicate values
-
Option 1: typical dense index
-
Repeated keys can be many
-
Problem: excess overhead
-
Disk space
-
Search time
-
-
-
-
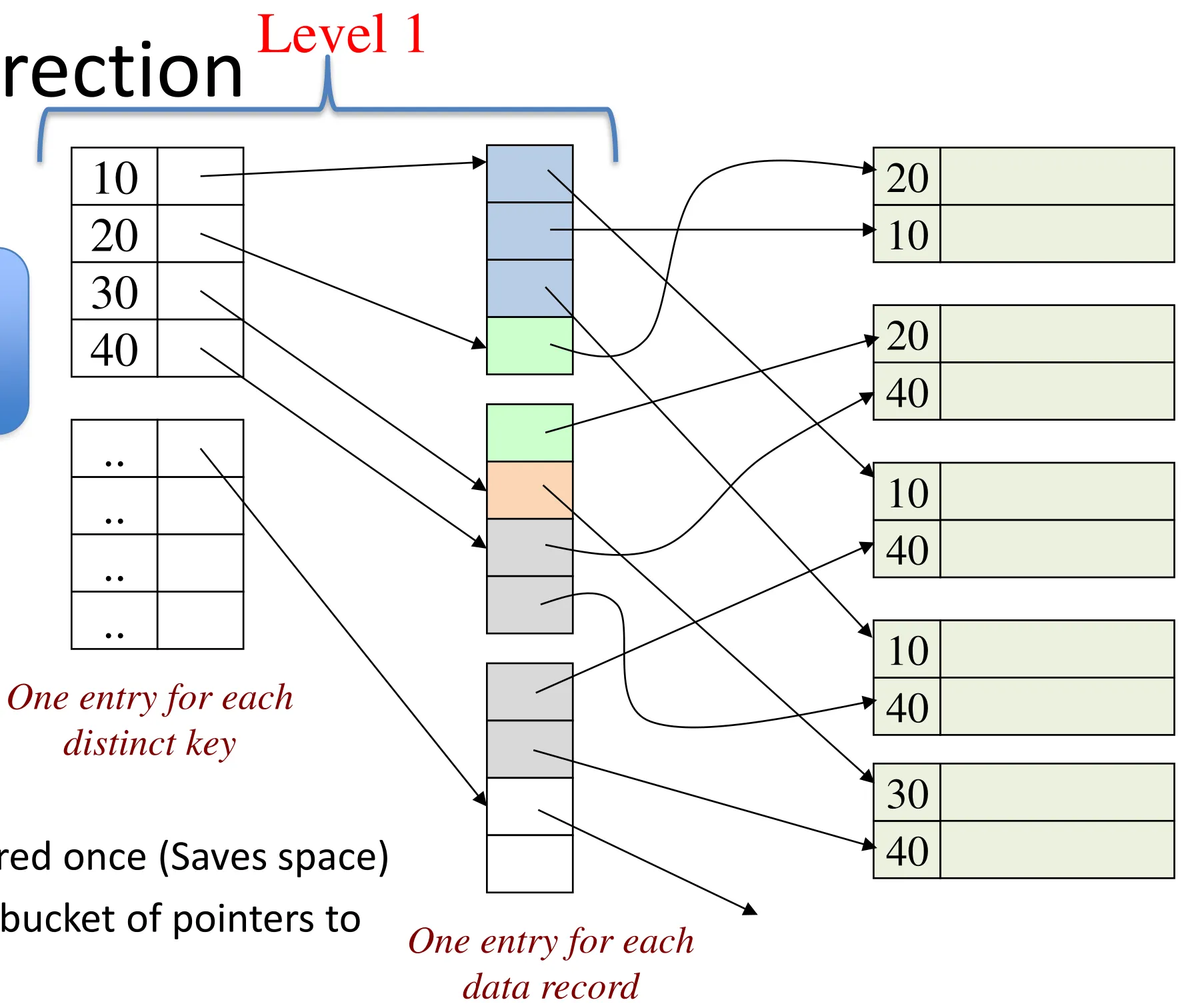
Option 2: indirection
-
Build a 2nd level index to store distinct values of the key
-
Each distinct value stored once (Saves space)
-
Each value points to a bucket of pointers to the duplicate values
-
-
B-trees
-
A disk-based multi-level balanced tree index structure
-
Disk-based
-
Each node in the tree is a disk page → has to fit in one disk page
-
The pointers are locations on disk either block ID or record ID
-
-
Multi-level
-
Has one root (can be the only level)
-
The height of the tree grows and shrinks dynamically as needed
-
We always (in search, insert, delete) start from the root and move down one level at a time
-
-
Balanced
- All leaf nodes are at the same height
-
-
B+ tree
-
Self-balancing, ordered tree data structure that allows searches, sequential access, insertions, and deletions in O(log n)
-
Generalization of a binary search tree, since a node can have more than two children
-
Optimized for systems that read and write large blocks of data
-
-
-
Properties
-
Each node (which is disk block) holds N keys and N + 1 pointers
-
Keys in any node are sorted from left to right
-
Keys in any level are also sorted from left to right
-
Each node is at least 50% full (Minimum 50% occupancy)
- Except the Root can have as minimum (1 key & 2 pointers)
-
No empty spaces in the middle of a node
-
Number of pointers in any node = number of keys + 1
- The rest are Null
-
-
Leaf node values
-
Approach #1: Record IDs
- A pointer to the location of the tuple to which the index entry corresponds
-
Approach #2: Tuple Data
-
The leaf nodes store the actual contents of the tuple
-
Secondary indexes must store the Record ID as their values
-
-
-
B+ tree visualization
-
-
Good utilization
-
B-tree nodes should not be too empty
-
Each node is at least 50% full (Minimum 50% occupancy)
- Except the Root can have as minimum (1 key & 2 pointers)
-
Use at least
-
Non-leaf: ceil((n+1)/2) pointers
-
Leaf: floor((n+1)/2) pointers to data
-
-
-
B-tree vs. B+tree
-
The original B-Tree from 1972 stored keys and values in all nodes in the tree.
-
A B+ Tree only stores values in leaf nodes.
-
B+tree more space-efficient, since each key only appears once in the tree.
-
Inner nodes only guide the search process.
-
-
Dense vs. sparse
-
In Theory, leaf level can be either dense or sparse
- Sparse only if the data file is sorted
-
In Practice, in most DBMS the leaf level is always dense
- One index entry for each data record
-
What about values in non-leaf levels?
- Not necessarily a subset of leaf values
-
-
B-tree in practice
-
Usually 3- or 4-level B-tree index is enough to index even large files
-
The height of the tree is usually very small
-
Good for searching, insertion, and deletion
-
Few I/Os (especially that the root can be always cached in memory)
-
-
-
Querying
-
Equality Search: Find all records with a search-key value of k.
-
1. Start with the root node
- Examine the keys (use binary search) until find a pointer to follow
-
2. Repeat until reach a leaf node
-
3. Search keys in the leaf node for the first key = k
-
4. Follow the pointers to the data records
-
-
Range Search: Find all records between [k1, k2].
-
1. Start with the root node and search for k1
- Examine the keys (use binary search) until find a pointer to follow
-
2. Repeat until reach a leaf node
-
3. Search the keys in the leaf node for the first key = k1 or the first larger
-
4. Move right while the key is not larger than k2 (may move from one node to another node)
-
5. Follow the pointers to the data records
-
-
-
Insertion
-
Find correct leaf L (searching)
-
Put data entry onto L
-
If L has enough space, done
-
Else, must split leaf node L (into L and a new node Lnew)
-
Redistribute entries evenly
-
Copy up middle key (1st value in LNEW) to parent.
-
Insert index entry pointing to LNEW into parent of L.
-
-
-
This can happen recursively
- To split internal node, redistribute entries evenly, but push up middle key. (Contrast with leaf splits.)
-
Splits “grow” tree; root split increases height.
- Tree growth: gets wider or one level taller at top.
-
-
Deletion
-
Start at root, find leaf L where entry belongs. (Searching)
-
Remove the entry.
-
If L is at least half-full, done!
- Do not leave empty spaces in the middle
-
If L has less than the minimum entries,
-
Try to re-distribute, borrowing from sibling (adjacent node with same parent as L).
-
If re-distribution fails, merge L and sibling.
-
-
-
If merge occurred, must delete entry (pointing to L or sibling) from parent of L.
-
Merge could propagate to root, decreasing height.
-
-
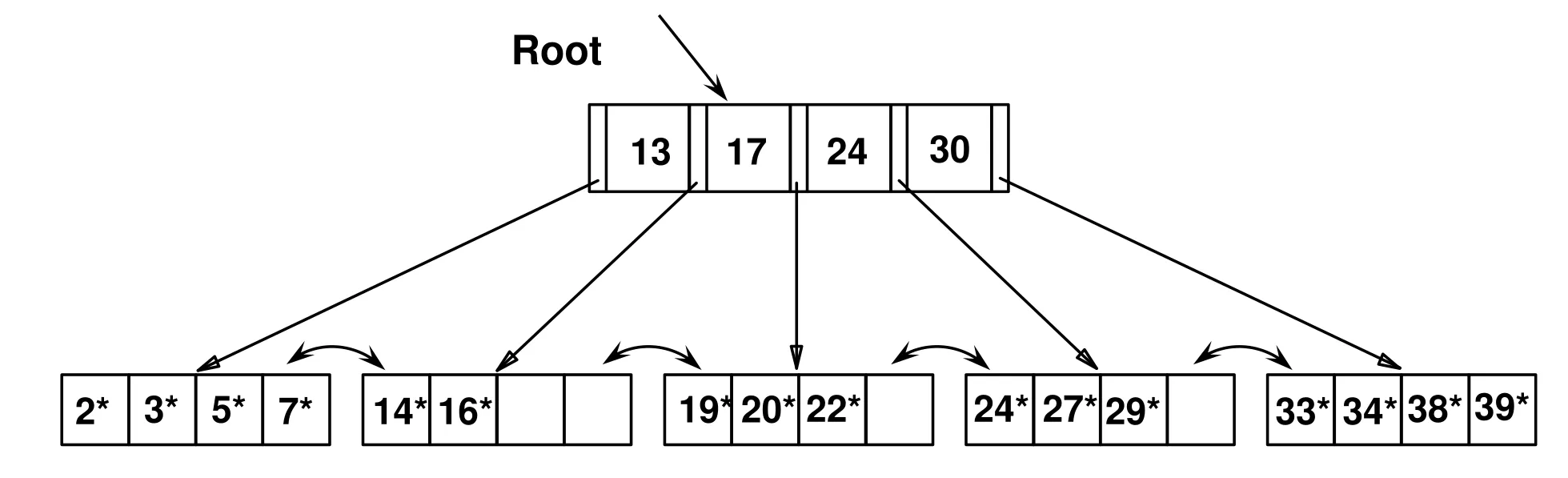
More practical deletion
-
When deleting 24*, allow its node to be under utilized
-
After some time with more insertions
- Most probably more entries will be added to this node
-
If many nodes become under-utilized ➔ Re-build the index
-
-
Hashing
-
Static hashing
-
Disk-based hash-based indexes
-
Adaptation of main memory hash tables
-
Support equality searches
-
No range searches
-
-
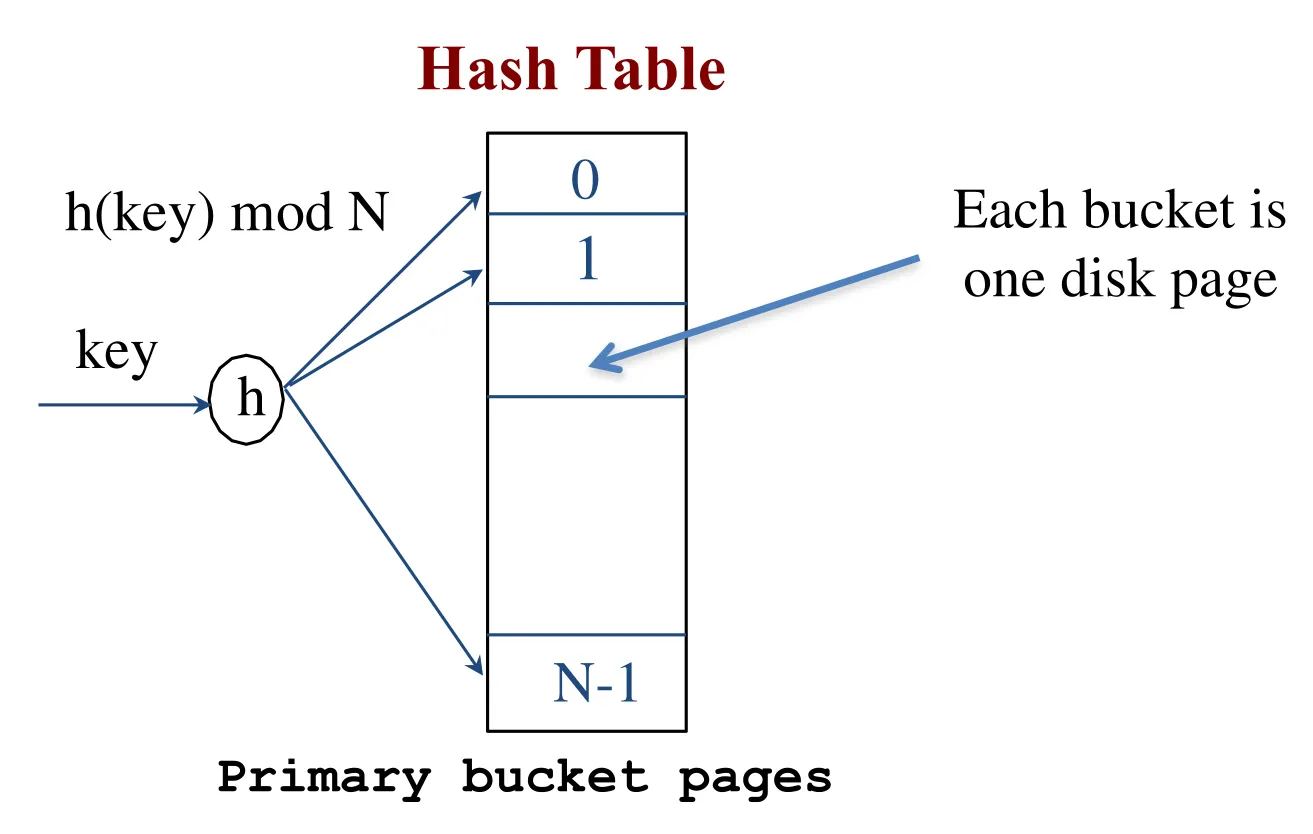
Hash table has N buckets (static means “N” does not change
-
Each bucket will be one disk page
-
Hash function h(k) maps key k to one of the buckets
-
-
-
- Within a bucket
-
Should we keep entries sorted?
-
Yes, if we care about CPU time
-
Makes the insertion and deletion a bit more expensive
-
-
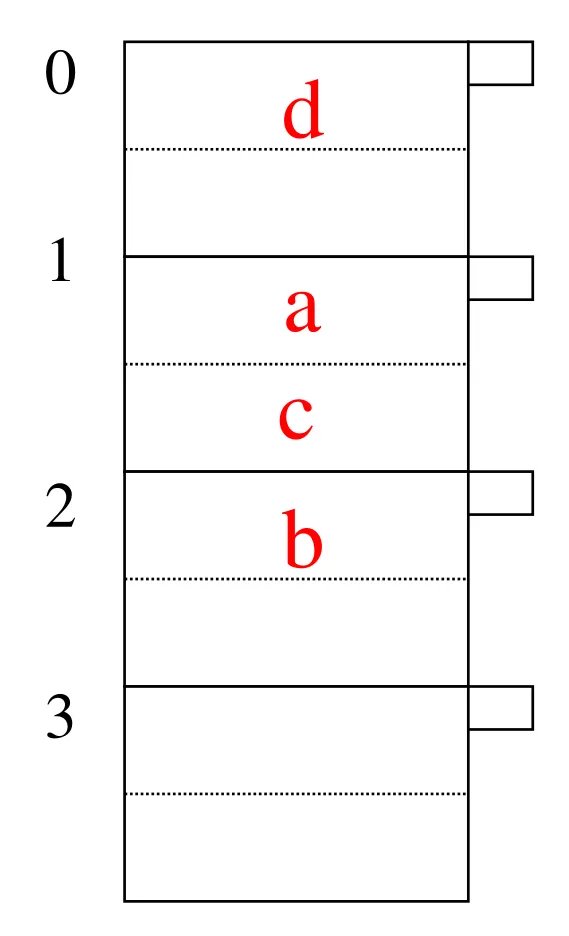
Lookup (Search for key = d)
-
Apply the hash function over d ➔ h(d) mod N = 0
-
Read the disk page of bucket 0
-
Search for key d
- If keys are sorted, then search using Binary search
-
-
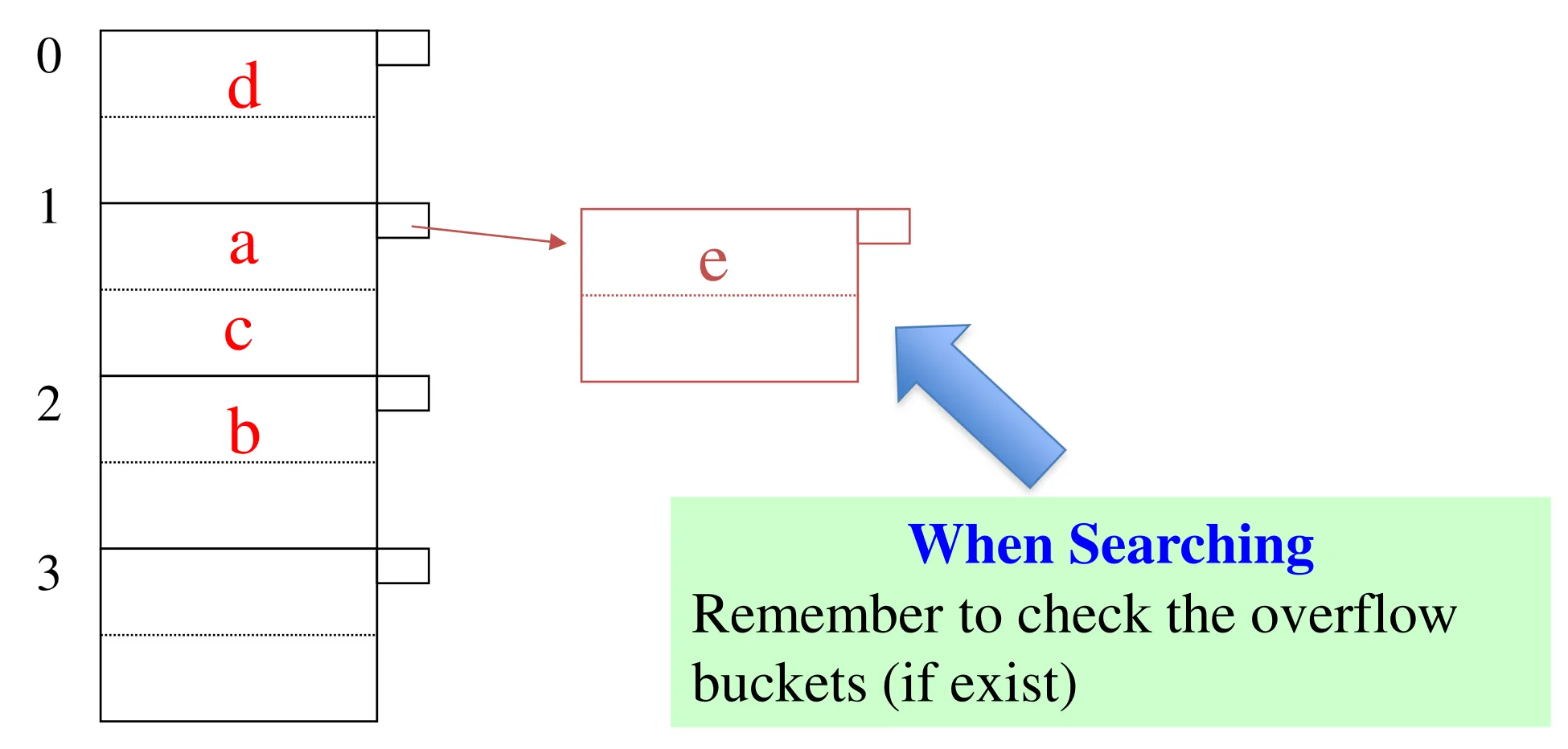
Insertion
-
Insertion with overflow
-
Insert key e ➔ h(e) mod N = 1
-
Create an overflow bucket and insert e
-
Overflow bucket is another disk block
-
-
Deletion
-
Search for the key to be deleted
-
In case of overflow buckets
- The overflow bucket may no longer be needed
-
-
Extensible (dynamic) hashing
-
No overflow buckets
-
The number of primary buckets is not fixed and it can grow
-
Start with some # of buckets (e.g., N=4 and h(k) = k)
-
Each bucket can fit fixed # of entries (e.g., M=4)
-
Problem: storing index entries directly on primary bucket eventually requires overflow buckets
-
Solution: Rather than storing entries directly, use a directory
-
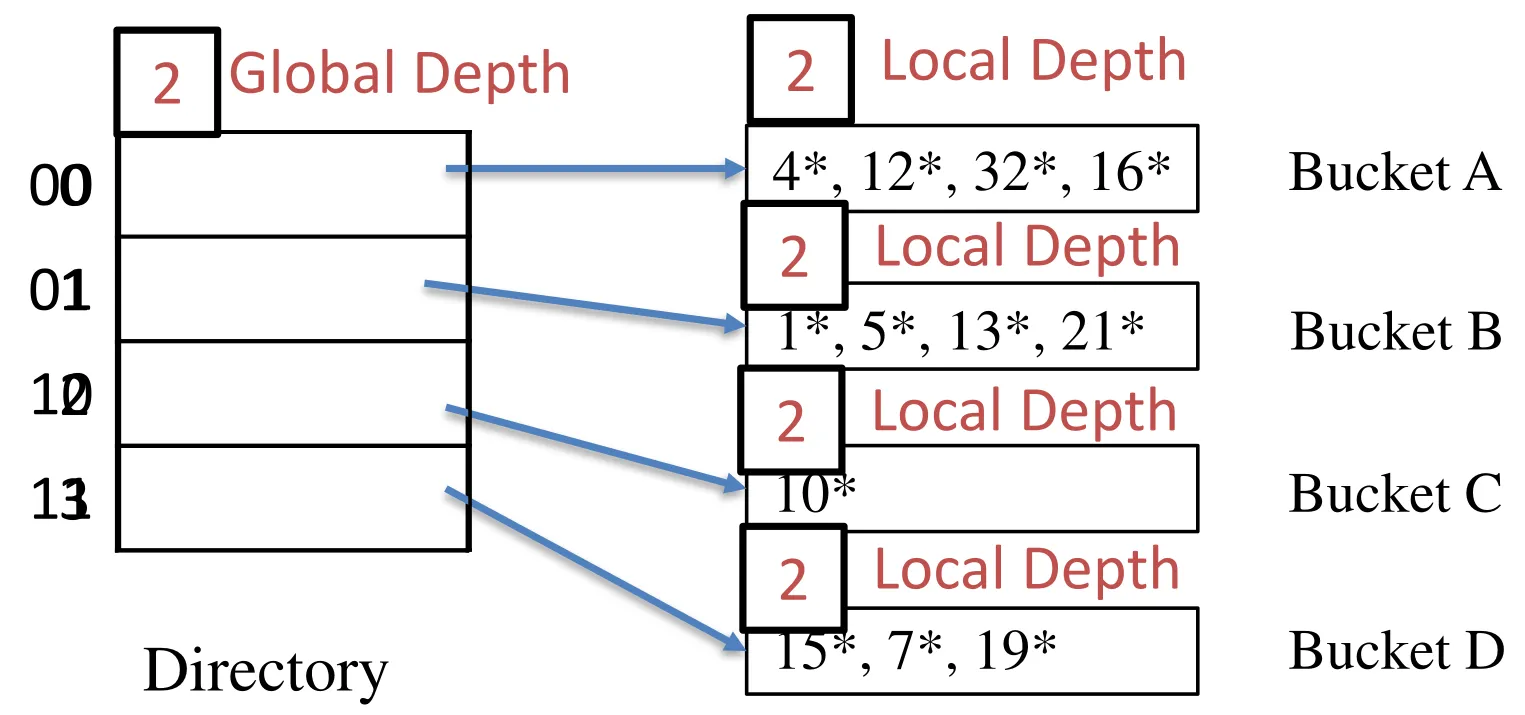
Binary representation (N=4)
-
Here we can use 2 bits to represent buckets (global depth=2)
-
How can we find bucket for key 12?
- Look at 2 rightmost bits of h(12)
-
Every key in bucket A has the same 2 last bits (local depth=2)
- Same for others
-
-
-
Given a key k ➔ we need to know k will go to which entry in the directory
-
Hash Function
-
Convert k into binary representation (0s and 1s)
-
Consider only the number of bits equal to the Global Depth value
- Take bits from right side (Least Significant bits)
-
-
Insertion
-
Case 1: Expand under local depth = global depth
-
Increment global depth
-
This means ➔ double the directory size
-
For the overflow bucket, divide into two
-
Increment their local depth
-
Re-distribute the keys based on the new local depth bits
-
For all other buckets, leave them as is (local depth < global depth)
-
Number of incoming pointers to each of these bucket is doubled
-
-
Case 2: Split while local depth < global depth
-
No need to double Directory
-
Only split the bucket
-
Increment local depth
-
Re-distribute its keys
-
-
-
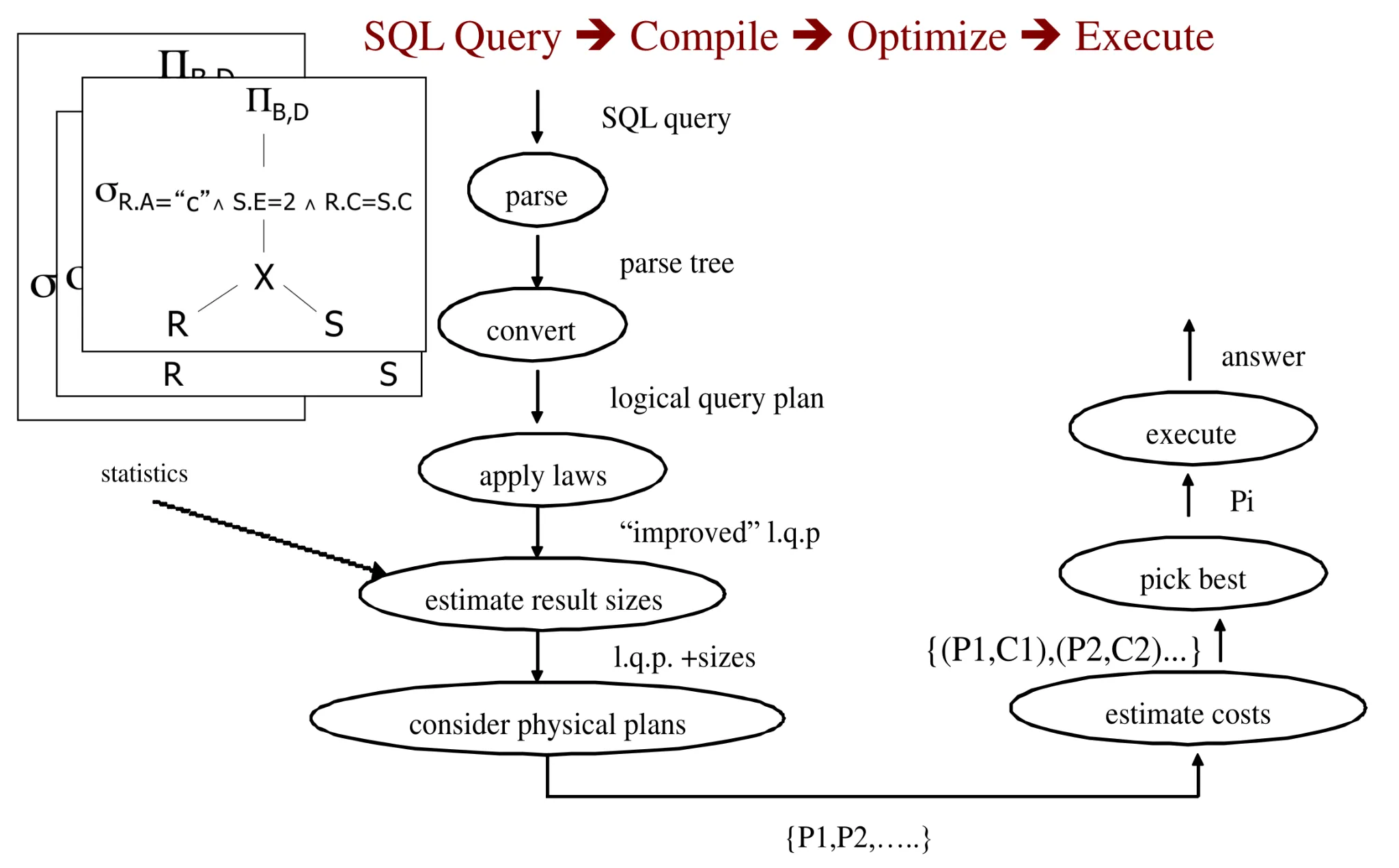
SQL & Query Processing
-
Execution engine
- Receives query plan from the query compiler and executes
-
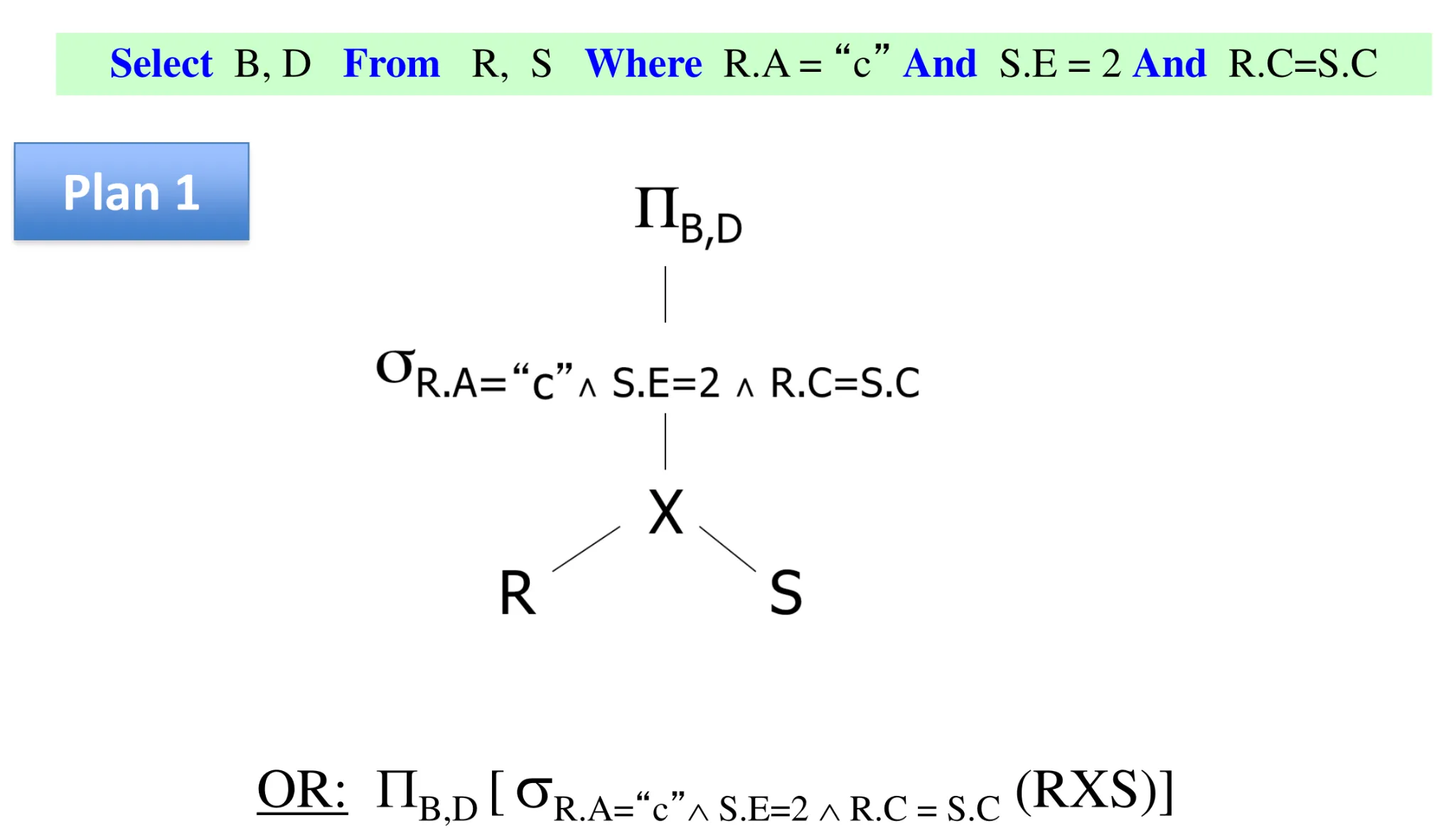
Relational algrebra express query plans
-
Intuition
-
Avoid cross product
-
Push down unary operators
-
Perform joins on smaller datasets
-
-
-
-
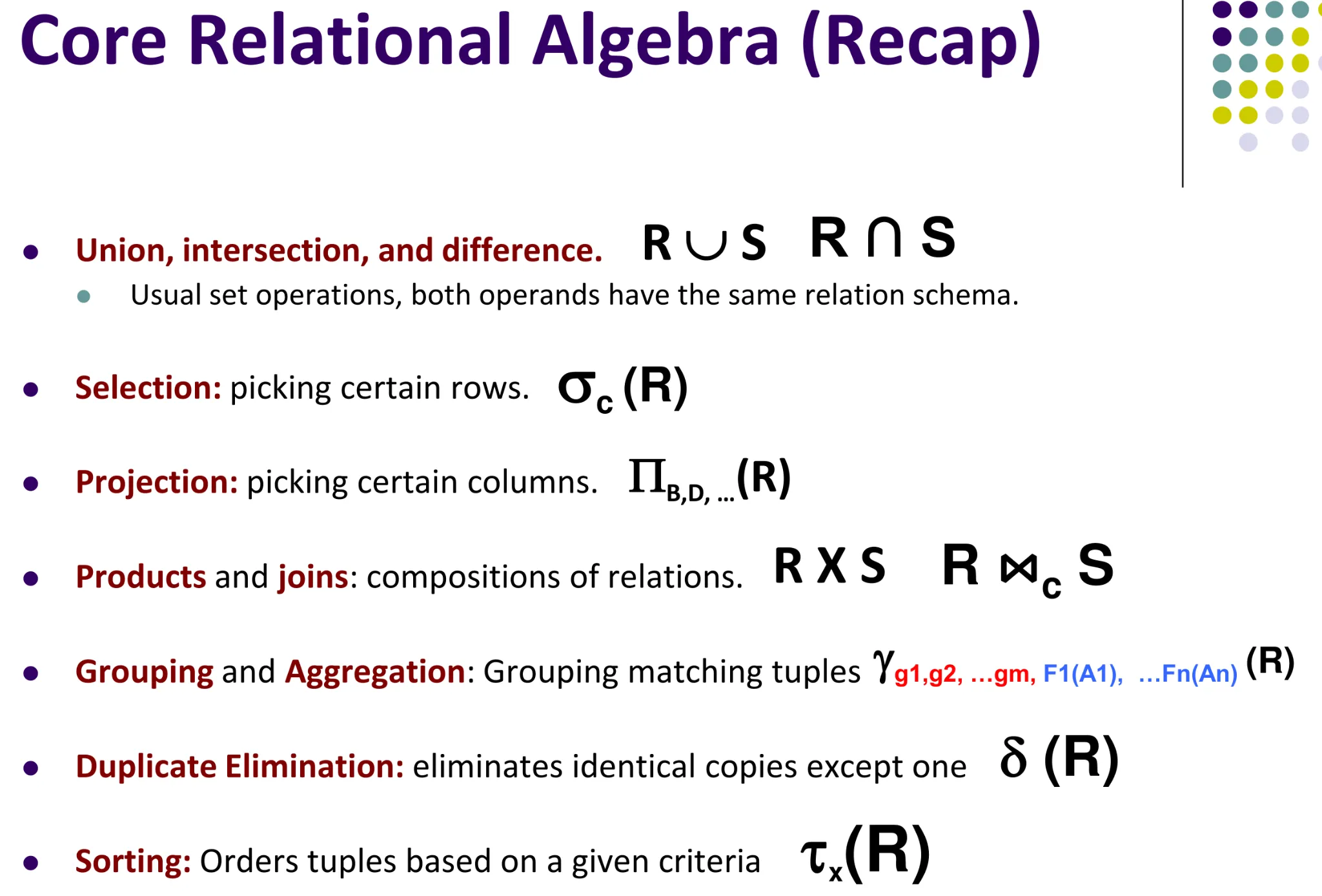
Set of operators that operate on relations
-
Operator semantics based on Set or Bag theory
-
Relational algebra form underlying basis (and optimization rules) for SQL
-
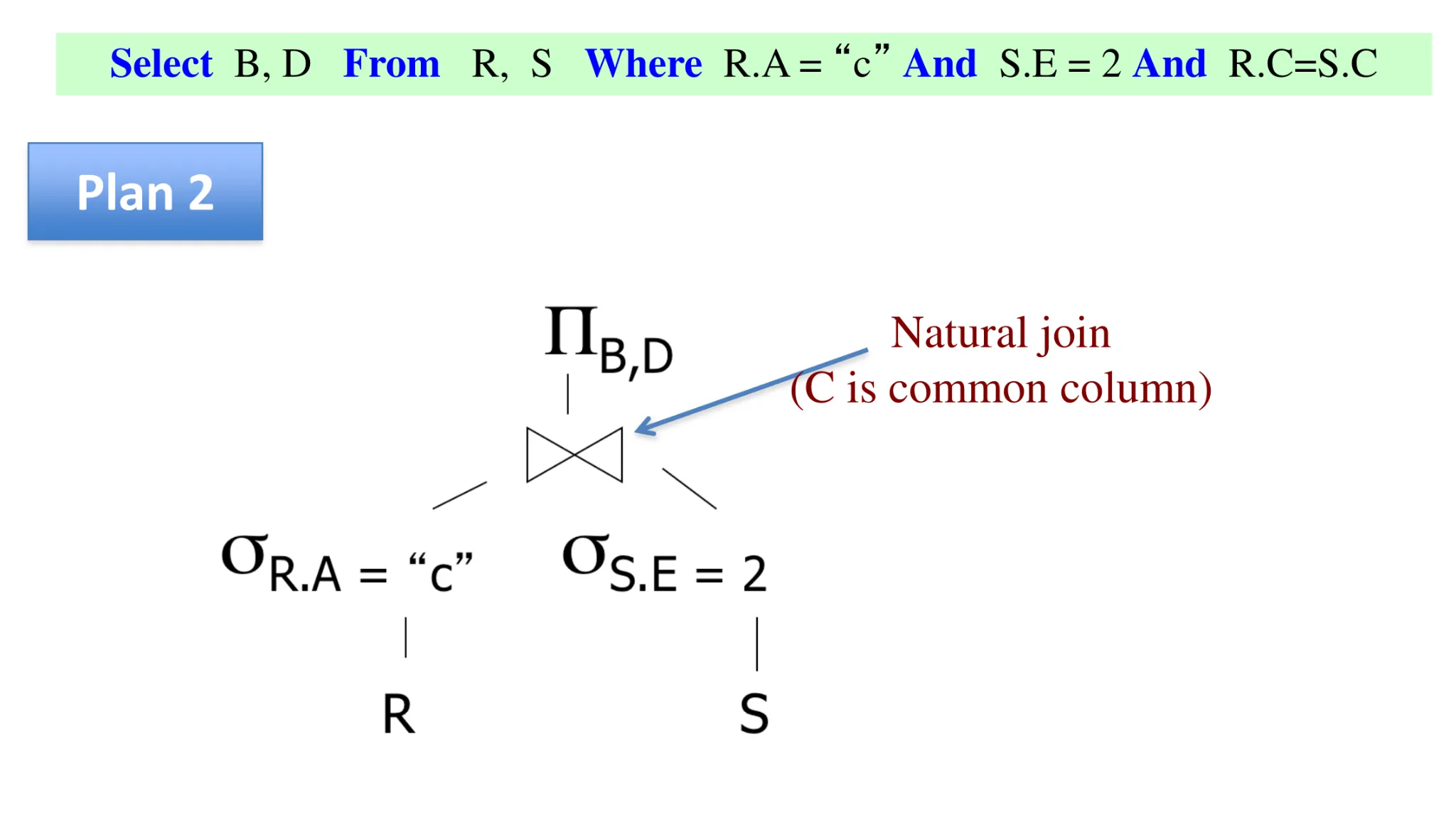
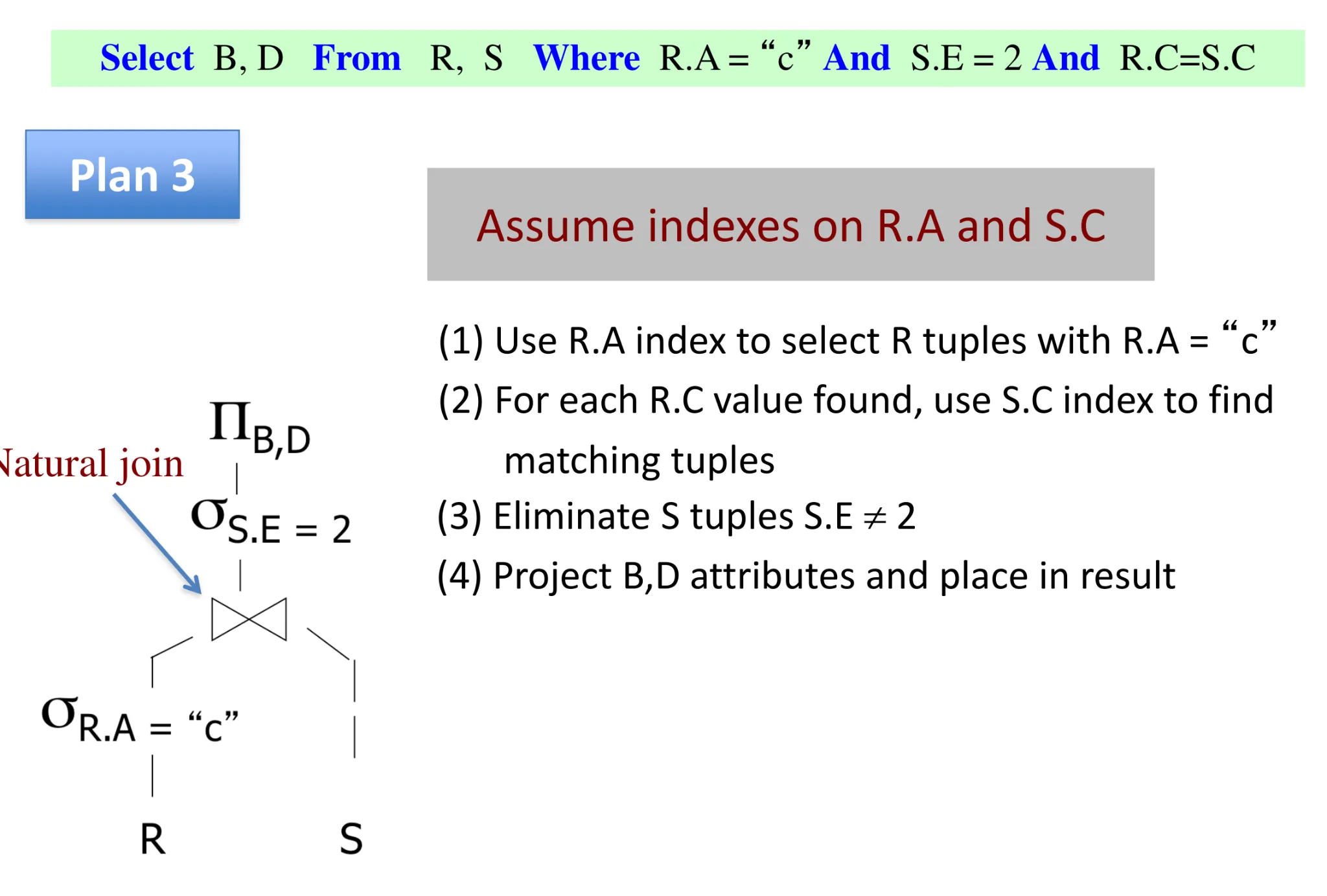
Query planning
-
Goal: equivalent query plans but cheaper operationally
-
Intuition
-
Minimize the size (number of tuples, number of attributes) of intermediate results
-
Push selections down in the expression tree as far as possible
-
Push down projections, or add new projections where applicable
-
-
- Overview of query execution
-
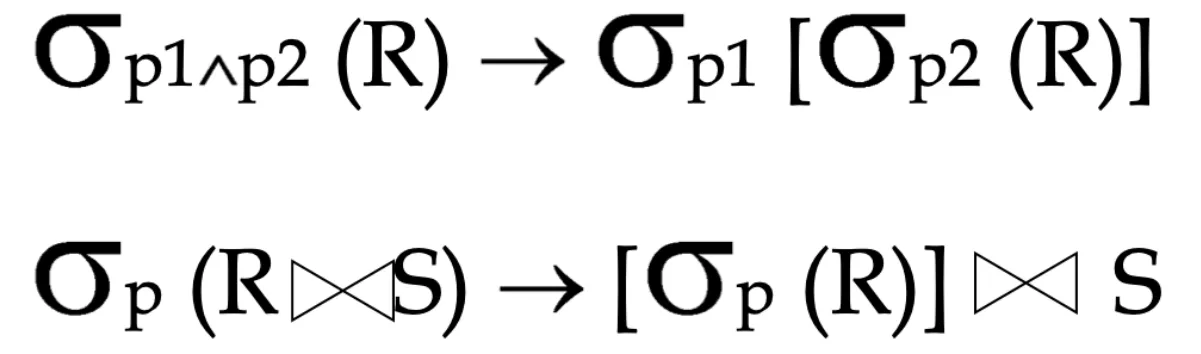
Heuristics
- Pushing selections
-
Dhisfo
-
Replace the left side of one of these (and similar) rules by the right side
-
Can greatly reduce number of tuples in intermediate results
-
Operator evaluation
-
Two categorizations
-
Technique
-
Number of passes
-
-
Algorithms for evaluating relational operators use some simple ideas extensively:
-
Indexing: Can use WHERE conditions to retrieve small set of tuples (selections, joins)
-
Iteration: Sometimes, faster to scan all tuples even if there is an index. (Sometimes we can scan the data entries in an index instead of the table itself (when?)
-
Partitioning: By using sorting or hashing, we can partition the input tuples and replace an expensive operation by similar operations on smaller inputs.
-
-
Number of passes: 1 pass, 2 pass, multi-pass
-
-
Common statistics over relation R
-
M: # of memory buffers available
-
B(R): # of blocks to hold all R tuples
-
T(R): # tuples in R
-
S(R): # of bytes in each of R’s tuple
-
V(R, A): # distinct values in attribute R.A
-
-
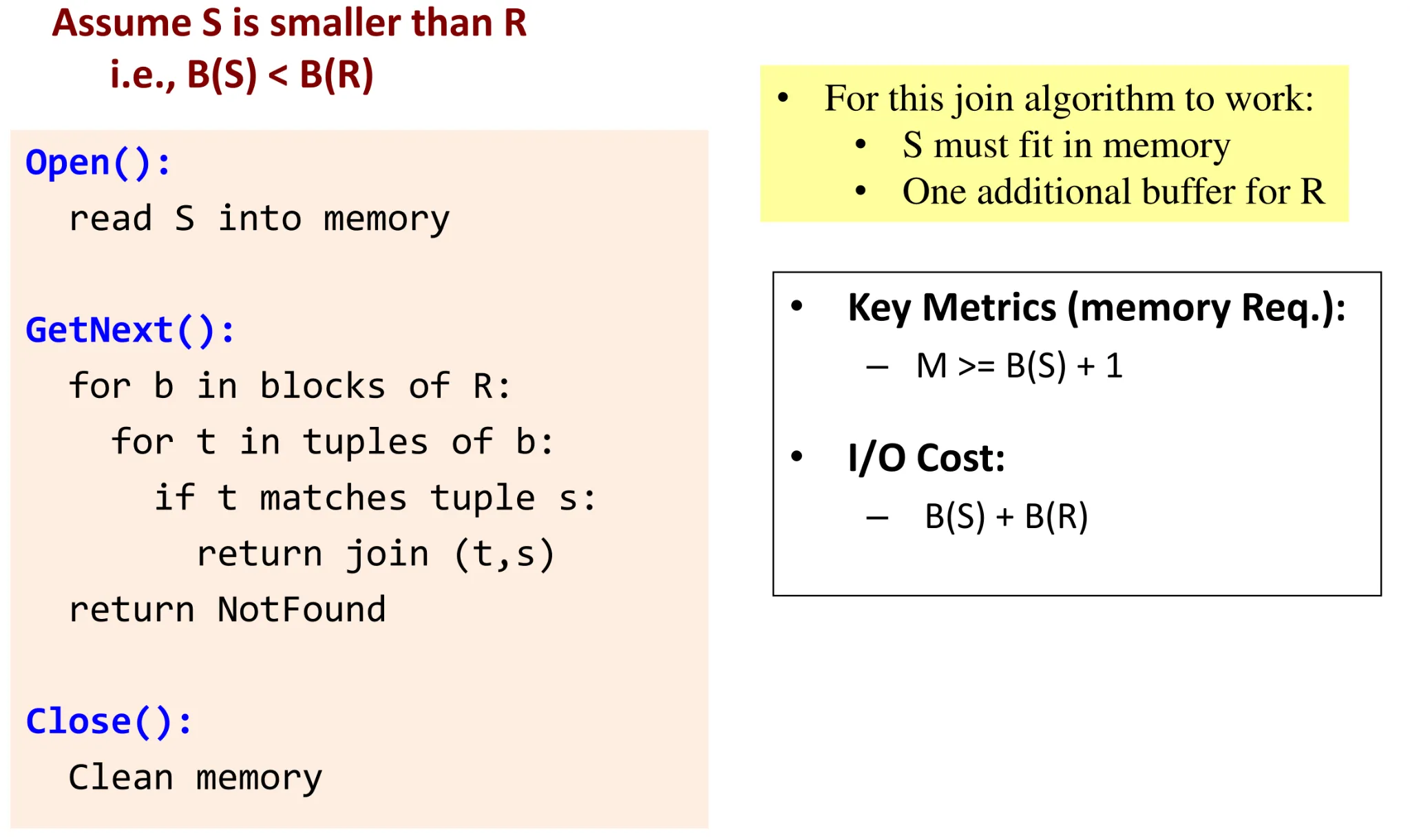
One pass operator evaluation algorithms
- Join (R, S)
-
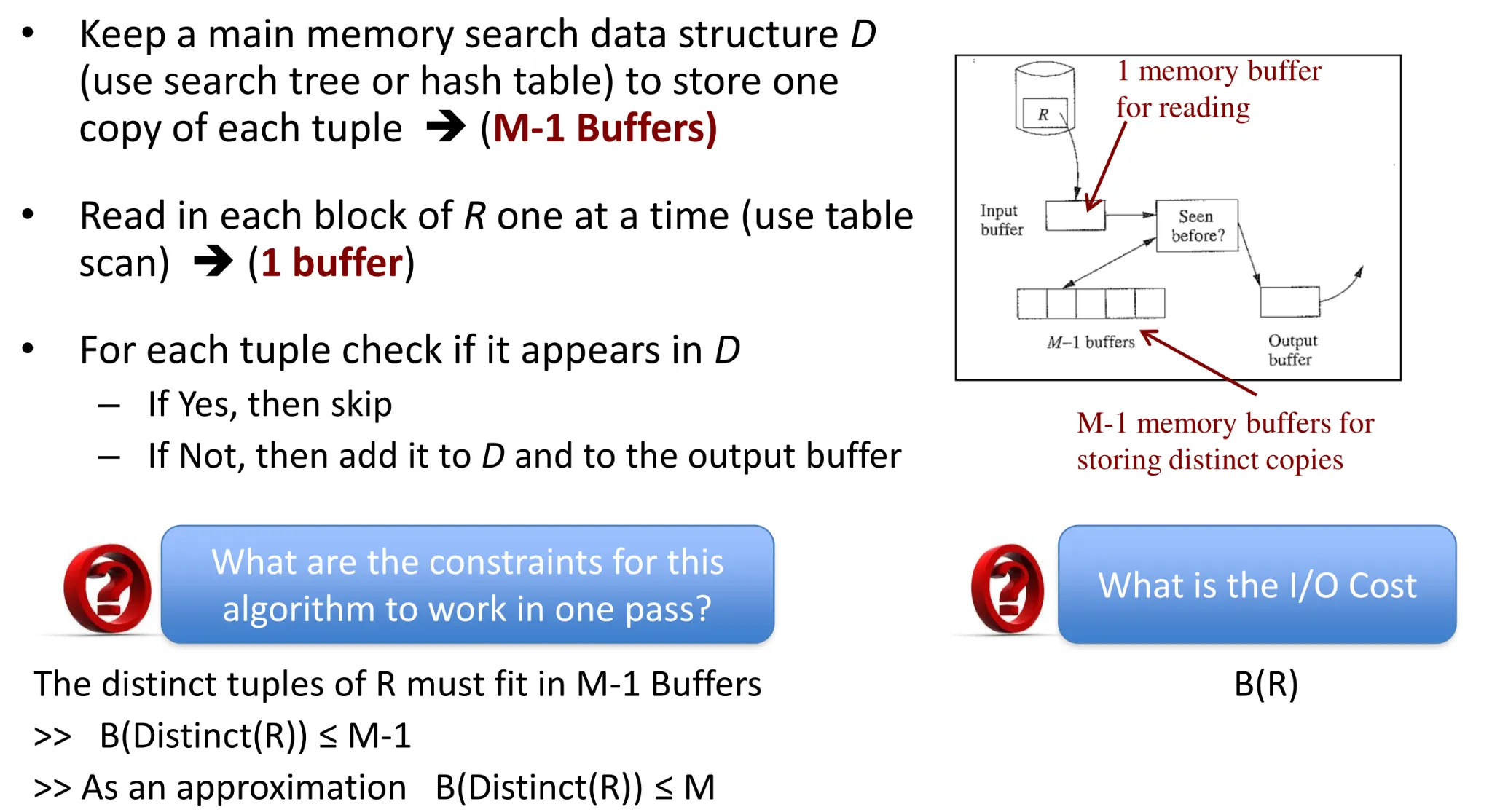
- Duplicate elimination
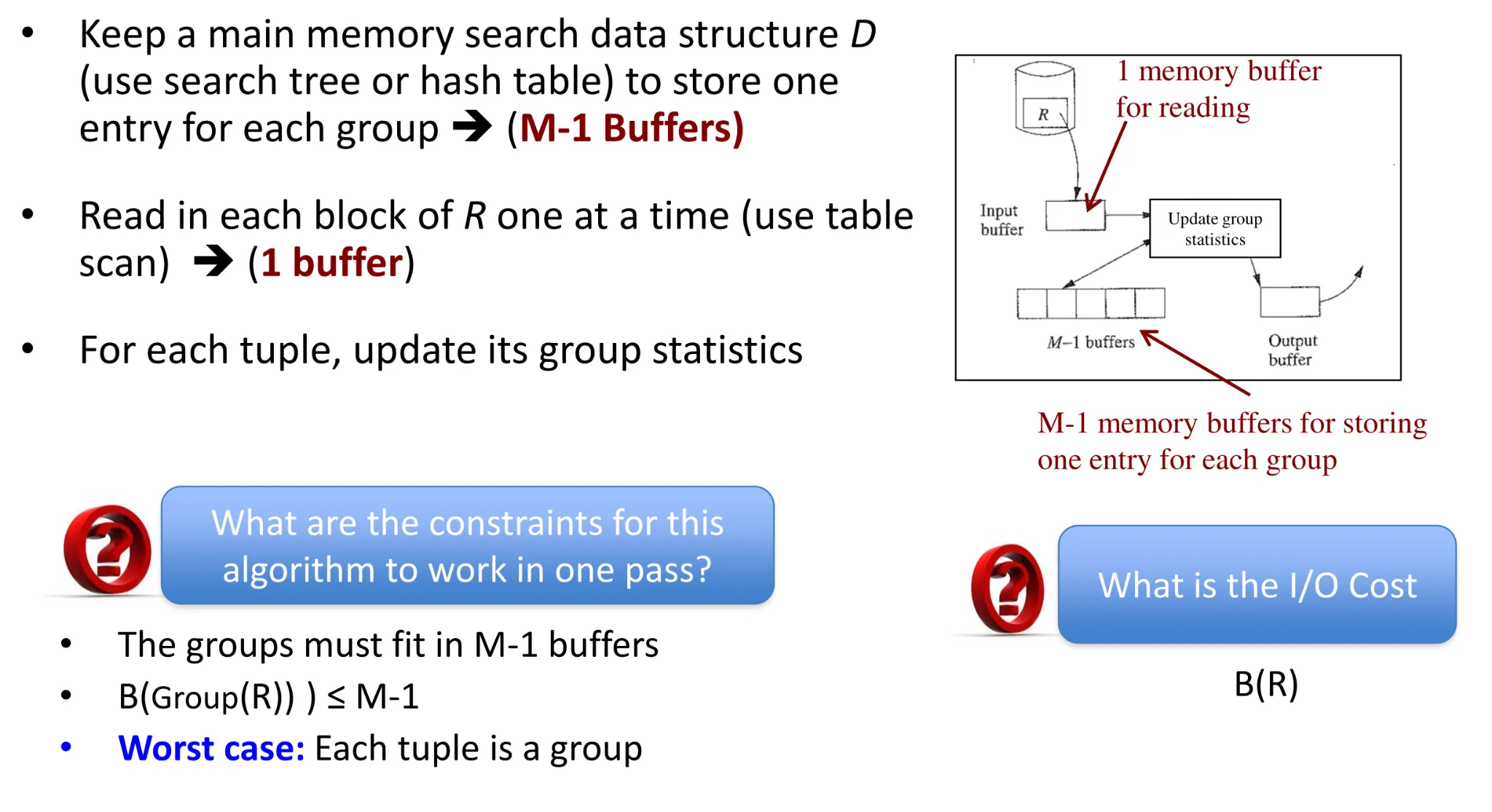
- Group by
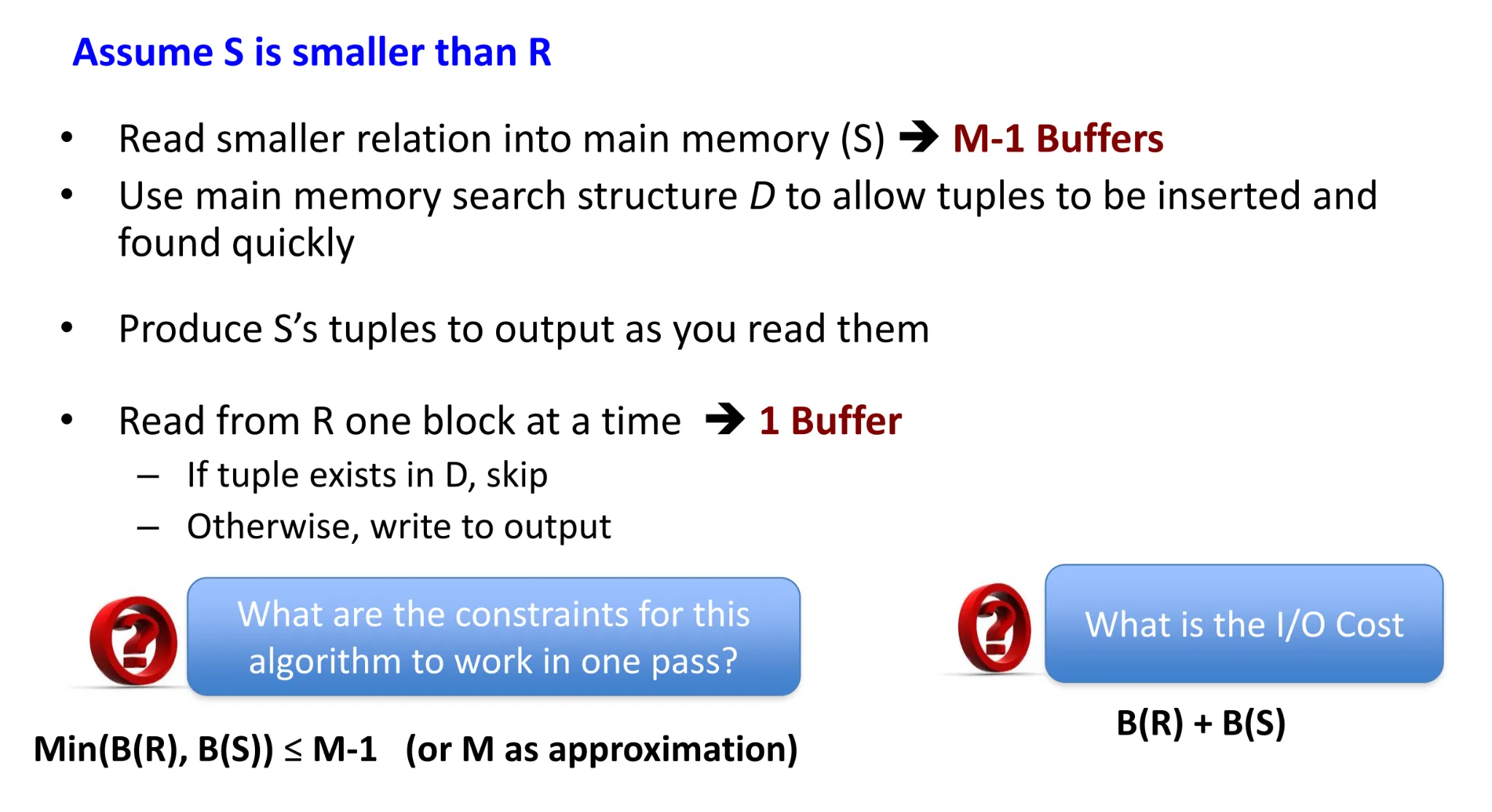
- Set union(R,S)
-
Blocking vs. non-blocking operators
-
Blocking operator cannot produce any tuples to the output until it processes all its inputs
-
Non-blocking operator (Pipelined) can produce tuples to output without waiting until all input is consumed
-
Examples
-
Join, duplicate elimination, union ➔ Non-blocking
-
Grouping ➔ Blocking
-
Selection, Projection ➔ Non-blocking
-
Sorting ➔ Blocking
-
-
-
Two pass algorithms
-
First Pass: Do a prep-pass and write the intermediate result back to disk
- We count Reading + Writing
-
Second Pass: Read from disk and compute the final results
- We count Reading only (if it is the final pass)
-
Sort-based two-pass algorithms
-
1st pass does a sort on some parameter(s) of each operand
-
2nd pass algorithm relies on sort results; can be pipelined
-
-
Hash-based two-pass algorithms
-
1st pass partitions input relation
-
2nd pass algorithm will work on each partition independently
-
-
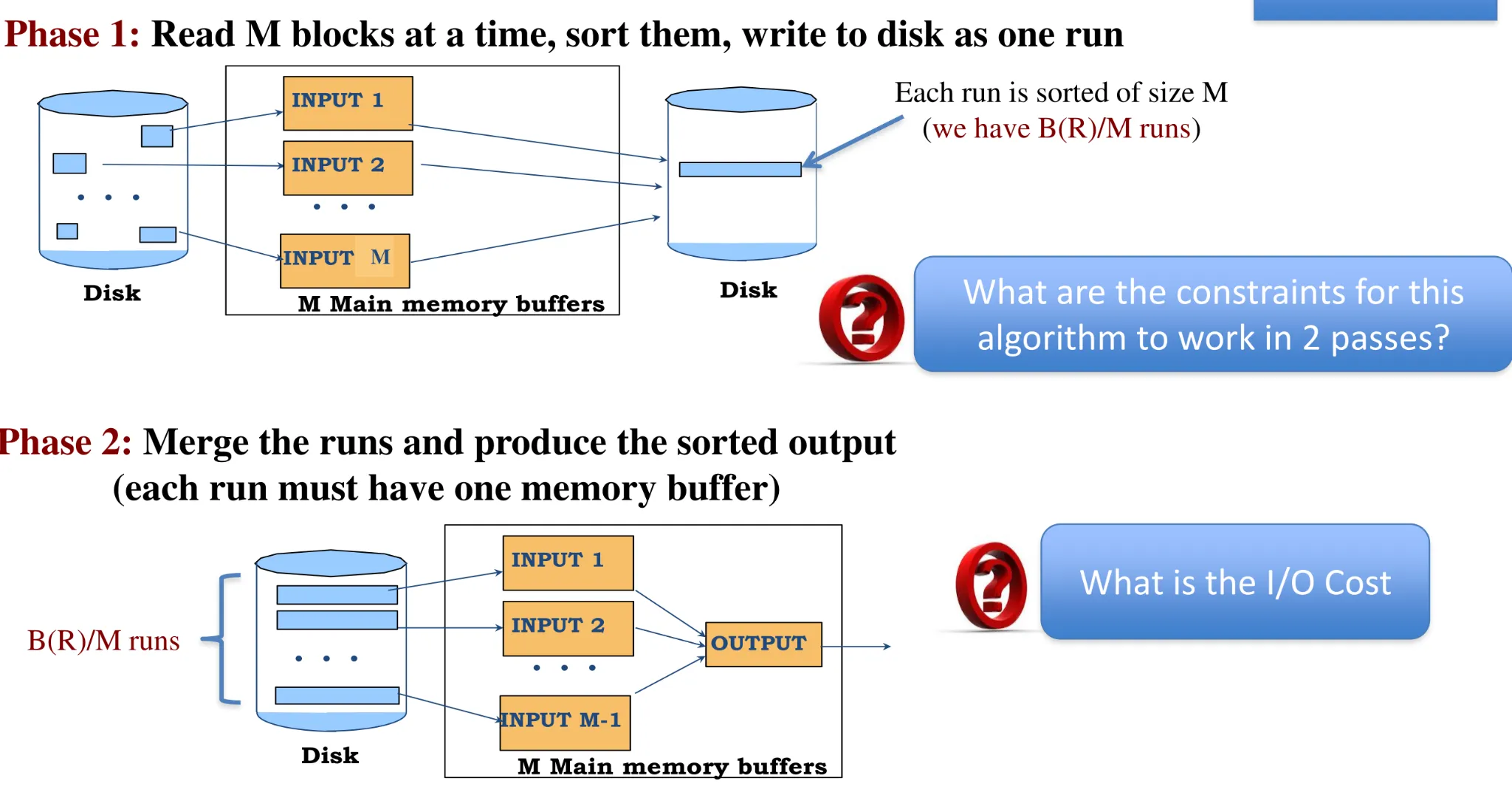
2-Pass external sort
-
-
Phase 1 → no constraints
-
Phase 2 → each run must have a memory buffer + one for output
-
B(R)/M ≤ M-1
-
Approx. B(R)/M ≤ M
-
B(R) ≤ M^2